dr hab. in_. Jerzy Honczarenko. Notatka składa się z 1 strony.
Klasyfikacja robotów przemysłowych: Roboty dzieli się przy wyróżnieniu klasy i możliwości sterowania pracą robota:
a) robot sekwencyjny - robot wyposażony w sekwencyjny układ sterowania,
b) robot realizujący zadane trajektorie - realizuje ustaloną procedurę sterowanych ruchów według instrukcji programowych specyfikujących żądane pozycje oraz żądaną prędkość ruchu
c) robot adaptacyjny - mający sensoryczny lub adaptacyjny układ sterowania, względnie uczący się układ sterowania ( przykłady: układ o możliwości zmiany właściwości dzięki wykorzystaniu informacji sensorycznych lub nagromadzonych doświadczeń) d) teleoperator - robot ze sterowaniem zdalnym realizowanym przez operatora lub komputer. Jego funkcje są związane z przenoszeniem na odległość funkcji motorycznych i sensorycznych operatora. Ze względu na sposób programowania i możliwości komunikowania się robota ze środowiskiem zewnętrznym: I generacja - roboty nauczone - urządzenie wyposażone w pamięć do której zostają wprowadzone rozkazy, a następnie - już bez ingerencji operatora - zdolne do wykonania czynności zaprogramowanych
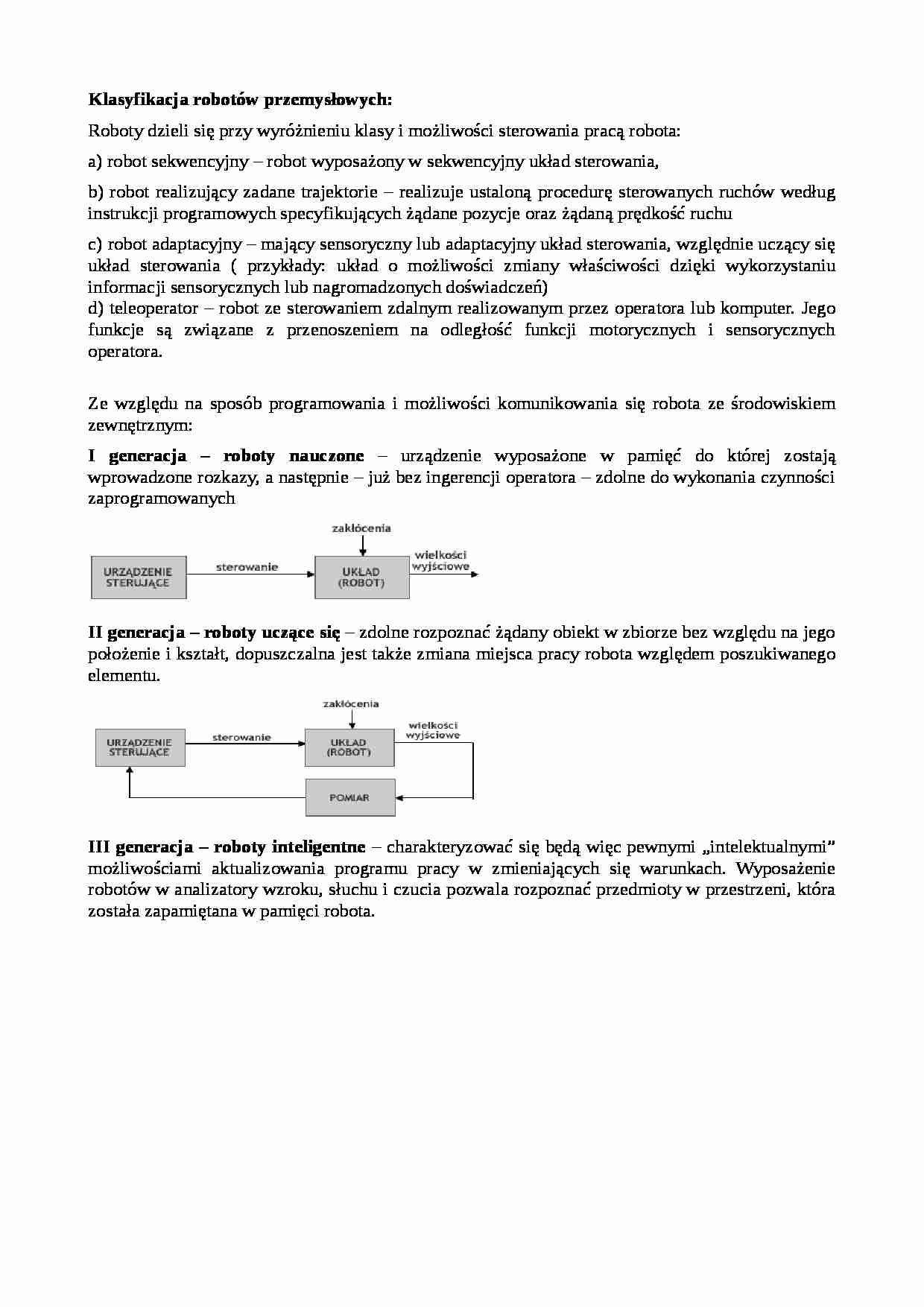
II generacja - roboty uczące się - zdolne rozpoznać żądany obiekt w zbiorze bez względu na jego położenie i kształt, dopuszczalna jest także zmiana miejsca pracy robota względem poszukiwanego elementu.
III generacja - roboty inteligentne - charakteryzować się będą więc pewnymi „intelektualnymi” możliwościami aktualizowania programu pracy w zmieniających się warunkach. Wyposażenie robotów w analizatory wzroku, słuchu i czucia pozwala rozpoznać przedmioty w przestrzeni, która została zapamiętana w pamięci robota.
... zobacz całą notatkę
Komentarze użytkowników (0)