1. Elementy składowe i struktura robotów
Manipulatory przemysłowe są zbudowane z członów połączonych przegubami w
otwarty łańcuch kinematyczny. Przeguby te są zazwyczaj obrotowe (rotacyjne) lub
pryzmatyczne (liniowe). Przeguby obrotowe są podobne do zawiasów i umoŜliwiają obrót
jednego członu względem drugiego. Przeguby pryzmatyczne umoŜliwiają ruch liniowy
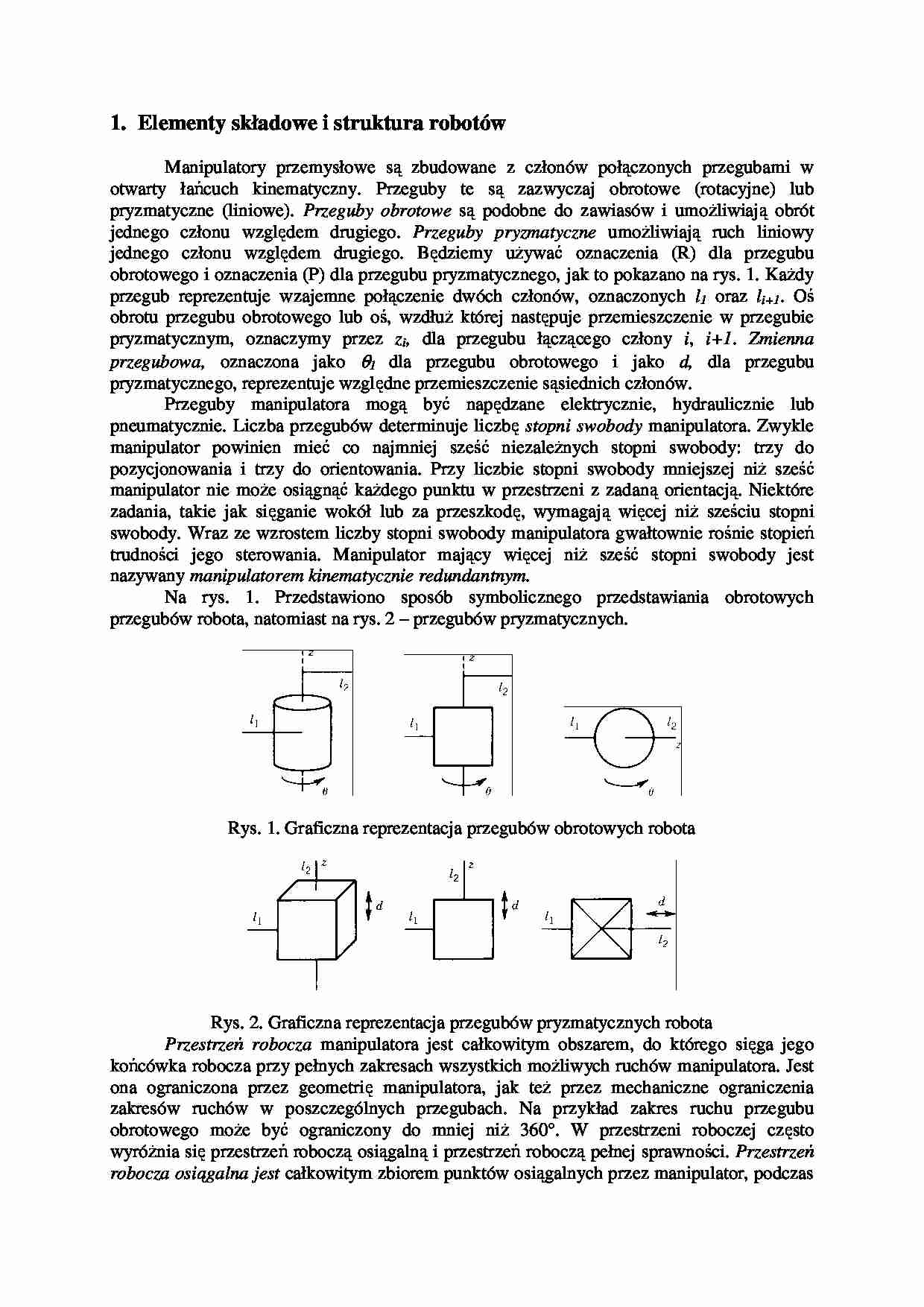
jednego członu względem drugiego. Będziemy uŜywać oznaczenia (R) dla przegubu
obrotowego i oznaczenia (P) dla przegubu pryzmatycznego, jak to pokazano na rys. 1. KaŜdy
przegub reprezentuje wzajemne połączenie dwóch członów, oznaczonych l1 oraz li+1. Oś
obrotu przegubu obrotowego lub oś, wzdłuŜ której następuje przemieszczenie w przegubie
pryzmatycznym, oznaczymy przez zi, dla przegubu łączącego człony i, i+1. Zmienna
przegubowa, oznaczona jako θ1 dla przegubu obrotowego i jako d, dla przegubu
pryzmatycznego, reprezentuje względne przemieszczenie sąsiednich członów.
Przeguby manipulatora mogą być napędzane elektrycznie, hydraulicznie lub
pneumatycznie. Liczba przegubów determinuje liczbę stopni swobody manipulatora. Zwykle
manipulator powinien mieć co najmniej sześć niezaleŜnych stopni swobody: trzy do
pozycjonowania i trzy do orientowania. Przy liczbie stopni swobody mniejszej niŜ sześć
manipulator nie moŜe osiągnąć kaŜdego punktu w przestrzeni z zadaną orientacją. Niektóre
zadania, takie jak sięganie wokół lub za przeszkodę, wymagają więcej niŜ sześciu stopni
swobody. Wraz ze wzrostem liczby stopni swobody manipulatora gwałtownie rośnie stopień
trudności jego sterowania. Manipulator mający więcej niŜ sześć stopni swobody jest
nazywany manipulatorem kinematycznie redundantnym.
Na rys. 1. Przedstawiono sposób symbolicznego przedstawiania obrotowych
przegubów robota, natomiast na rys. 2 – przegubów pryzmatycznych.
Rys. 1. Graficzna reprezentacja przegubów obrotowych robota
Rys. 2. Graficzna reprezentacja przegubów pryzmatycznych robota
Przestrzeń robocza manipulatora jest całkowitym obszarem, do którego sięga jego
końcówka robocza przy pełnych zakresach wszystkich moŜliwych ruchów manipulatora. Jest
ona ograniczona przez geometrię manipulatora, jak teŜ przez mechaniczne ograniczenia
zakresów ruchów w poszczególnych przegubach. Na przykład zakres ruchu przegubu
obrotowego moŜe być ograniczony do mniej niŜ 360°. W przestrzeni roboczej często
wyróŜnia się przestrzeń roboczą osiągalną i przestrzeń roboczą pełnej sprawności. Przestrzeń
robocza osiągalna jest całkowitym zbiorem punktów osiągalnych przez manipulator, podczas
gdy przestrzeń robocza pełnej sprawności składa się z tych punktów, które manipulator moŜe
osiągnąć z wyznaczoną orientacją końcówki roboczej. Oczywiście przestrzeń robocza pełnej
sprawności jest podzbiorem przestrzeni roboczej osiągalnej.
1.1. Ogólna klasyfikacja kinematyki
Manipulatory przemysłowe są co prawda urządzeniami ogólnego przeznaczenia,
jednak w praktyce zwykle projektuje się je z myślą o pewnej klasie zastosowań, jak np.
spawanie, przenoszenie materiałów lub
(…)
… zadanej pozycji.
Wyprowadzenie dynamicznych równań ruchu dla robota nie jest zadaniem łatwym z
powodu duŜej liczby stopni swobody i występujących w układzie nieliniowości. W celu
realizacji tego zagadnienia (wyprowadzenia równań ruchu takiego systemu) stosuje się tzw.
metodykę wykorzystującą równania dynamiczne Lagrange'a. Dodatkowo dla członów
sztywnych pełny opis dynamiki robota obejmuje dynamikę…
…
θ1
θβ
x0
x
Rys .26. Wyznaczenie kąta θ1 w przegubie pierwszym dwuczłonowego robota płaskiego
Jeśli zauwaŜymy, Ŝe
oraz
θ1 = θβ - θα
(13)
y
x
A następnie skorzystamy z twierdzenia sinusów, postaci
a
b
c
=
=
= 2R
sin α sin β sin γ
w wyniku czego moŜemy napisać, Ŝe
a sin(π − θ 2 ) a2 sin θ 2
sin θα = 2
=
x2 + y2
x2 + y2
Wykonując następnie proste przekształcenia, otrzymujemy następujące zaleŜności
θ β…
… się niejednokrotnie teorię sterowania. Problem sterowania ruchem
składa się z problemu śledzenia i tłumienia zakłóceń. Polega on na określeniu wejścia
sterującego potrzebnego do śledzenia trajektorii, która została zaplanowana dla manipulatora,
przy równoczesnym tłumieniu zakłóceń, spowodowanych niemoŜliwymi do modelowania
zjawiskami dynamicznymi, takimi jak tarcie i szum. Standardowe podejścia do sterowania
robota…
… zaawansowane
metody nieliniowej teorii sterowania, są niejednokrotnie przydatne do sterowania robotów o
duŜych moŜliwościach funkcjonalnych.
3.4. Sterowanie siłą
Gdy manipulator raz osiągnie pozycję B, musi odtwarzać kontur powierzchni S, zapewniając
stałą siłę prostopadłą do powierzchni. MoŜliwe jest, Ŝe znając lokalizację obiektu i kształt
konturu, rozwiąŜemy to zadanie tylko za pomocą sterowania…
…" nie jest jednoznaczna, poniewaŜ obrót o kąt - θ wokół osi wektora – k
jest taki sam, jak obrót o kąt θ wokół osi wektora k, tzn.
Rk,θ = R-k,-θ
(78)
JeŜeli θ = 0, to R jest macierzą jednostkową, a oś obrotu nie jest określona.
Przykład 7.
ZałóŜmy, Ŝe macierz R została utworzona przez obrót o 90° wokół osi z0, następnie
przez obrót o 30° wokół osi y0, a w końcu przez obrót o 60° wokół osi x0. Wówczas
0
0 cos 30° 0…
... zobacz całą notatkę


Komentarze użytkowników (0)