To tylko jedna z 13 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
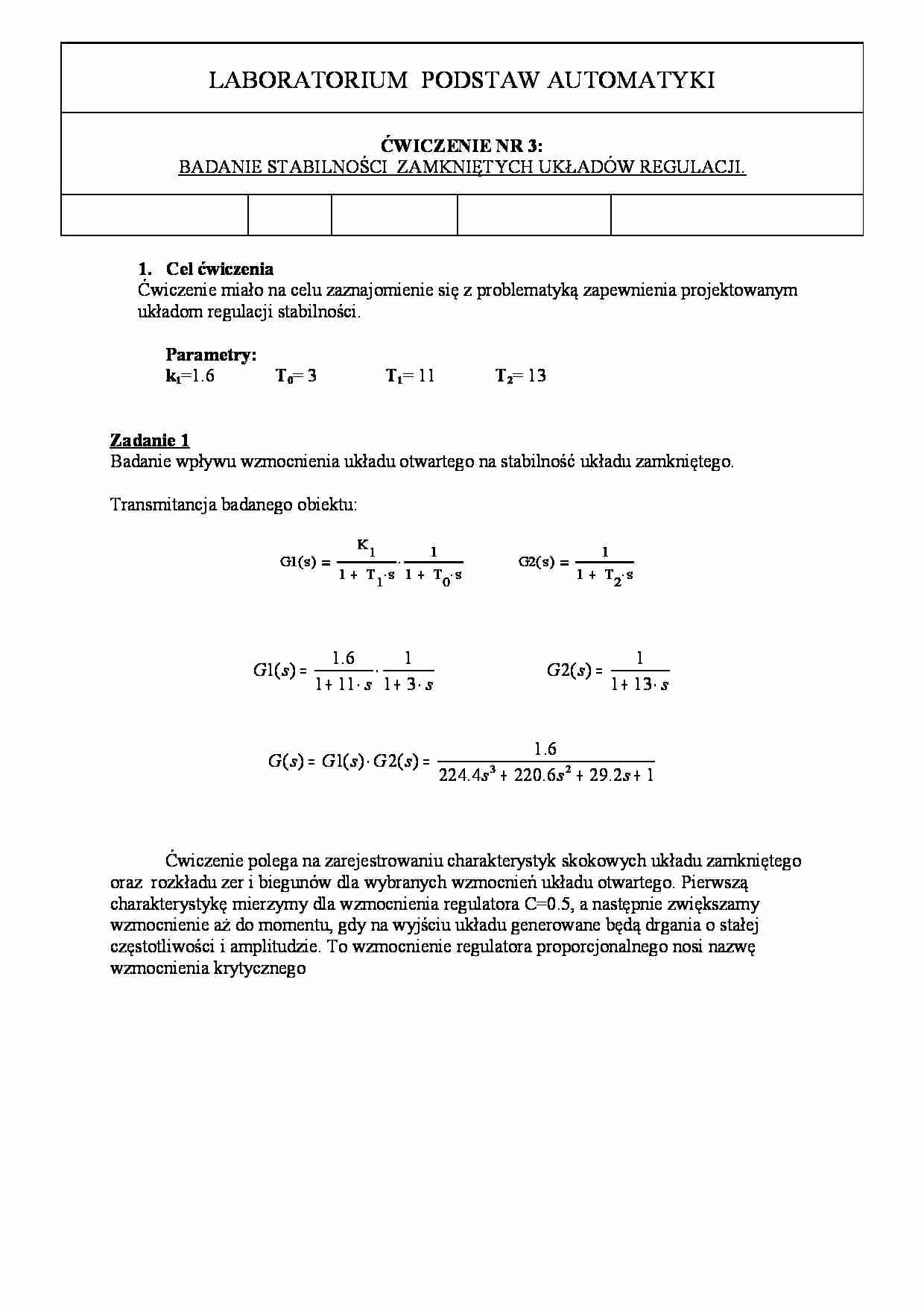
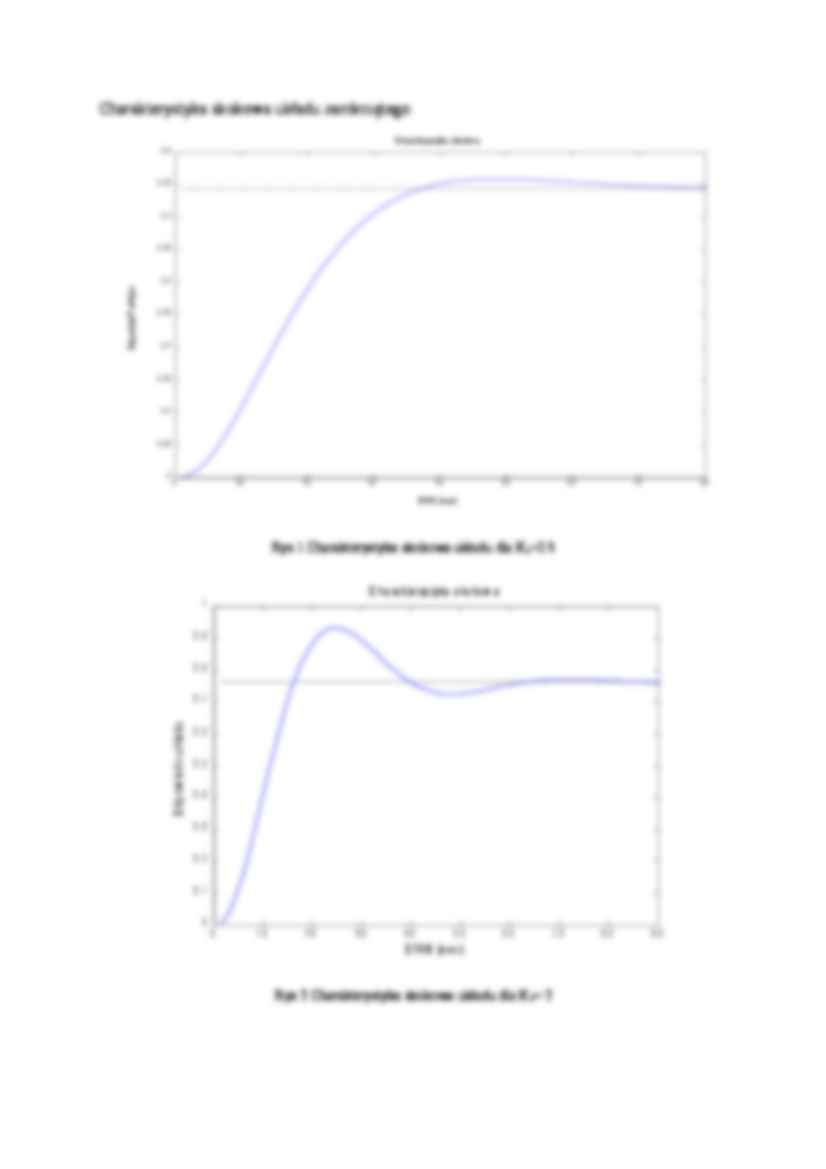
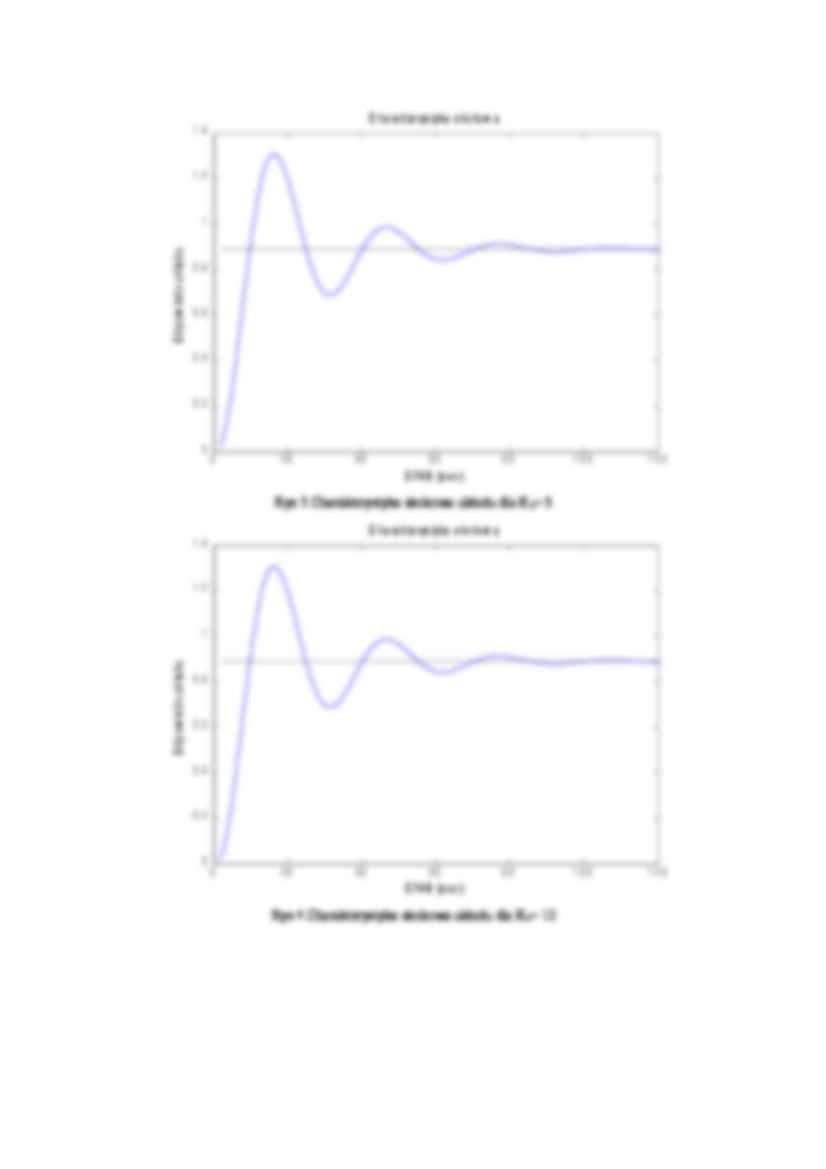
1. Cel ćwiczenia Ćwiczenie miało na celu zaznajomienie się z problematyką zapewnienia projektowanym układom regulacji stabilności. Parametry: k1 =1.6 T0 = 3 T1 = 11 T2 = 13 Zadanie 1 Badanie wpływu wzmocnienia układu otwartego na stabilność układu zamkniętego. Transmitancja badanego obiektu: G1 s ( ) K 1 1 T 1 s ⋅ + 1 1 T 0 s ⋅ + ⋅ G2 s ( ) 1 1 T 2 s ⋅ + s s s G ⋅ + ⋅ ⋅ + = 3 1 1 11 1 6 . 1 ) ( 1 s s G ⋅ + = 13 1 1 ) ( 2 1 2 . 29 6 . 220 4 . 224 6 . 1 ) ( 2 ) ( 1 ) ( 2 3 + + + = ⋅ = s s s s G s G s G Ćwiczenie polega na zarejestrowaniu charakterystyk skokowych układu zamkniętego oraz rozkładu zer i biegunów dla wybranych wzmocnień układu otwartego. Pierwszą charakterystykę mierzymy dla wzmocnienia regulatora C=0.5, a następnie zwiększamy wzmocnienie aż do momentu, gdy na wyjściu układu generowane będą drgania o stałej częstotliwości i amplitudzie. To wzmocnienie regulatora proporcjonalnego nosi nazwę wzmocnienia krytycznego LABORATORIUM PODSTAW AUTOMATYKI ĆWICZENIE NR 3: BADANIE STABILNOŚCI ZAMKNIĘTYCH UKŁADÓW REGULACJI. Charakterystyka skokowa układu zamkniętego: C h a r a k t e r y s ty k a s k o k o w a C Z A S ( s e c ) O d p o w ie d Ÿ u k ³a d u 0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5 0 . 3 0 . 3 5 0 . 4 0 . 4 5 0 . 5 Rys 1.Charakterystyka skokowa układu dla K1=0.5 C h a r a k t e r y s ty k a s k o k o w a C Z A S ( s e c ) O d p o w ie d z u k la d u 0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 9 0 0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 6 0 . 7 0 . 8 0 . 9 1 Rys 2.Charakterystyka skokowa układu dla K2= 2 C h a r a k t e r y s ty k a s k o k o w a C Z A S ( s e c ) O d p o w ie d z u k la d u 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 0 0 . 2 0 . 4 0 . 6 0 . 8 1 1 . 2 1 . 4 Rys 3.Charakterystyka skokowa układu dla K3= 5 C h a r a k t e r y s ty k a s k o k o w a C Z A S ( s e c ) O d p o w ie d z u k la d u 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 0 0 . 2 0 . 4 0 . 6 0 . 8 1 1 . 2 1 . 4 Rys 4.Charakterystyka skokowa układu dla K4= 10 C h a r a k t e r y s ty k a s k o k o w a
(…)
… zwiększamy stałą czasową inercji T2.
T2 zwiększamy dwukrotnie T2= 9*2=18, stąd g2 = 1/(1+18s) a g(s)= g1 * g2 * 7.22
T2 = 13 ⋅ 2 = 26 , stąd G =
1
(1 + 26s )
a
G ( s ) = G1 ⋅ G2 ⋅ 17.3
C H A R AK T E R YS TYK A B O D E G O
50
M O D U L (d B )
Zm = 0 - (5) = -5
5
0
-5 0
-1 0 0
0
FA ZA (d e g )
-4 5
-9 0
Z f = - 1 9 2 - ( -1 8 0 ) = - 1 2
-1 3 5
180
-- 1 9 2
-2 2 5
-2 7 0
10
-3
10
-2
-1
10
C Z E S T O T L…
…
Z f d a z y d o n ie s k o n c z o n o s c i
-1 8 0
-2 2 5
-2 7 0
10
-3
10
-2
-1
0
10
10
C z e s to tliw o s c ( r a d /s e c )
10
1
10
Rys 1. Logarytmiczna charakterystyka amplitudowa Bode’a dla K1=0.5
2
C h a r a k t e r y s ty k a B o d e g o
50
M o d u l (d B )
0
-1 2
Z m = 0 - (- 1 2 ) = 1 2
-5 0
-1 0 0
-1 5 0
0
-4 5
fa z a (d e g )
-9 0
-- 1 3 0
135
-1 8 0
-2 2 5
Z f = - 1 3 0 - ( -1 8 0 ) = 5 0
-2 7 0
10
-3
10
-2
-1
0
10
10
C z e s to tliw o s c ( r a d /s e c )
10
1
10
2
Rys 2. Logarytmiczna charakterystyka amplitudowa Bode’a dla K2= 3
C h a r a k t e r y s ty k a B o d e g o
50
Z m = 0 - (- 1 2 ) = 1 2
M o d u l (d B )
0
-1 2
-5 0
-1 0 0
-1 5 0
0
Fa za (d e g )
-4 5
-9 0
Z F = -1 5 5 -( -1 8 0 ) = 3 5
-1 3 5
-1 5 5
-1 8 0
-2 2 5
-2 7 0
10
-3
10
-2
-1
0
10
10
C z e s to tliw o s c ( r…
… regulatora:
K1
1
1
⋅
⋅
⋅C
1 + T1 ⋅ s 1 + T0 ⋅ s 1 + T2 ⋅ s
Go ( s ) =
Transmitancja układu otwartego:
G0 ( s ) =
Lo ( s )
1. 6 ⋅ C
=
3
M o ( s)
224.4 s + 220.6 s 2 + 29.2 s + 1
Lo(s)-wielomian operatora Laplace’a licznika
Mo(s)-wielomian mianownika
Równanie charakterystyczne:
1.6 C + 224.4 s 3 + 220.6 s 2 + 29.2 s + 1 = 0
a 0 =1.6 C +1
a1 = 29.2
1.5 6 +1>0
=>
C > - 0.625
a 2 = 220.6
a 3 = 224.4
Aby układ…
... zobacz całą notatkę
Komentarze użytkowników (0)