Sekcja I
Grupa 4
Ćwiczenie nr 5
Temat: Badanie przemieszczenia pionowego obiektu.
1. Dane do ćwiczenia (temat nr 19):
Obliczenie wysokości reperu roboczego 1
Pomiar wyjściowy:
Pomiar aktualny:
Δh2=
Δh3=
Δh6=
Δh2=
Δh3=
Δh6=
5,3464
4,7795
1,7423
5,3214
4,7551
1,7126
Niwelacja reperów roboczych na obiekcie:
Pomiar wyjściowy:
Pomiar aktualny:
1-2=
2-3=
3-4=
4-1=
1-2=
2-3=
3-4=
4-1=
0,0112
0,0191
0,0097
0,0423
0,0254
0,0334
0,0127
0,0645
Wysokości reperów:
Rp2=
Rp3=
Rp6=
219,1520
218,6792
215,6427
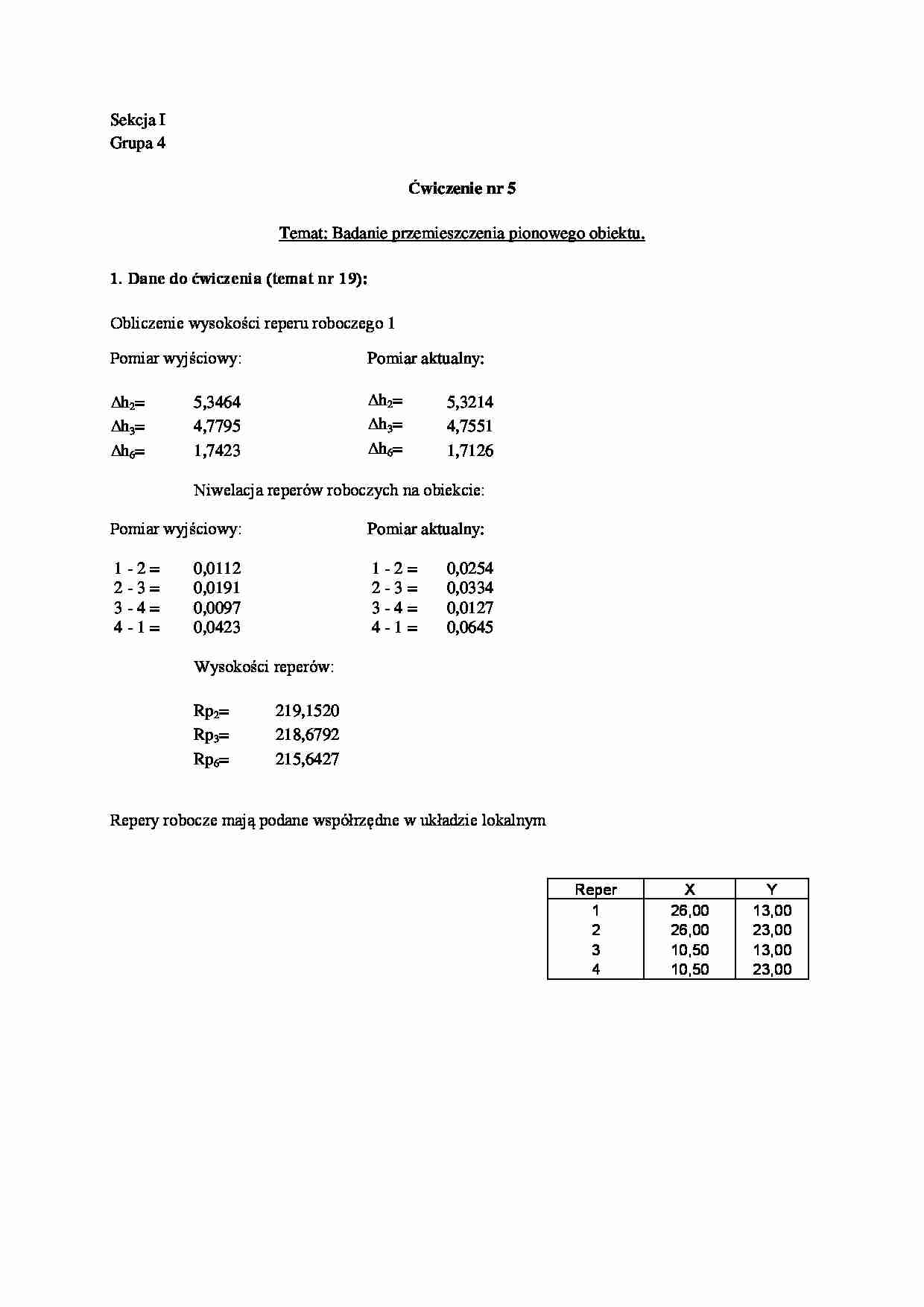
Repery robocze mają podane współrzędne w układzie lokalnym
Reper
1
2
3
4
X
26,00
26,00
10,50
10,50
Y
13,00
23,00
13,00
23,00
2. Obliczenie wysokości punktu 1:
xwyr = xo + Δx
Δx =
pomiar wyjściowy
pomiar aktualny
H1=
H1=
H1=
H1śr ważona=
213,8056
213,8997
213,9004
213,8674
H1=
H1=
H1=
H1śr ważona=
213,8306
213,9241
213,9301
213,8931
Wyrównana wysokość punktu 1 dla
pomiaru wyjściowego:
xwyr = xo + Δx =
213,8674
Kontrola generalna
[pvv]=[pll]-[pl]^2/[p]
[pll][pl]^2/[p]=
[pvv]= 2916,29
2916,29
Ocena dokładności
Błąd średni obserwacji:
=
38,2 mm/km
Błąd średni niewiadomej (wyrównanej
wysokości):
=
Wyrównana wysokość punktu 1 dla
pomiaru aktualnego:
xwyr = xo + Δx =
213,8931
3) Kontrola generalna
[pvv]=[pll]-[pl]^2/[p]
[pvv]= 2984,93
[pll][pl]^2/[p]=
2984,93
4) Ocena dokładności
Błąd średni obserwacji:
=
38,6 mm/km
31,7
mm
Błąd średni niewiadomej (wyrównanej
wysokości):
=
32,1 mm
3. Niwelacja reperów roboczych na obiekcie:
pomiar wyjściowy
nr
Δh
1
Δhwyr
213,8674
+6
0,0112
2
2
213,8360
3
0,0097
0,0334
0,0127
213,8257
-6
0,0423
1
0,0070
4. Obliczenie przemieszczenia reperów roboczych:
Uz=Z1-Z0
Uz1=
Uz2=
Uz3=
Uz4=
Dla modelu
0,0256
0,0138
0,0018
0,0011
Uo+xi* ωxzi+yi* ωyzi = Uzi
5. Obliczenie nieznanych parametrów na podstawie równań błędów:
Uo- pionowe przesunięcie obiektu
ωxz- nachylenie względem osi X
ωyz- nachylenie względem osi Y
Vi = Uo+xi* ωxzi+yi* ωyzi - Uzi
v1=
v2=
v3=
v4=
1+
1+
1+
1+
26,00*
26,00*
10,50*
10,50*
Zapis macierzowy
X=(AT*A)-1*AT*L
ωxz+
ωxz+
ωxz+
ωxz+
13*
23*
13*
23*
ωyz
ωyz
ωyz
ωyz
+0,0256
+0,0138
+0,0018
+0,0011
0,0317
213,8378
0,0110
213,8268
0,0663
213,8931
Σ=
-0,0023
213,8694
+18
0,0645
213,8674
Σ=
4
0,04173
1
213,8931
-18
0,01028
H
0,0237
-18
0,01968
+6
Δhwyr
-18
0,0254
213,8557
0,0191
4
1
0,01178
+6
3
H
pomiar aktualny
nr
Δh
1
1
1
1
A=
T
A *A=
T
-1
(A *A) =
0,0004
0,0012
-0,0006
X=
V=
4,8763
-0,0760
-0,1800
-0,0028
0,0028
0,0028
-0,0028
Uo=
ωxz=
ωyz=
0,0004
0,0012
-0,0006
6. Kontrola ogólna:
VT*V = LT*L*A*X
0,000031 = 0,000031
[VV]=0,000031
mo= 0,0056
ωmax= 0,001334
26,00
26,00
10,50
10,50
4
73
72
-0,0760
0,0042
0
13
23
13
23
L=
73
1572,5
1314
-0,1800
0
0,0100
0,0256
0,0138
0,0018
0,0011
72
1314
1396
T
A *L=
0,0423
1,0557
0,6995
... zobacz całą notatkę


Komentarze użytkowników (0)