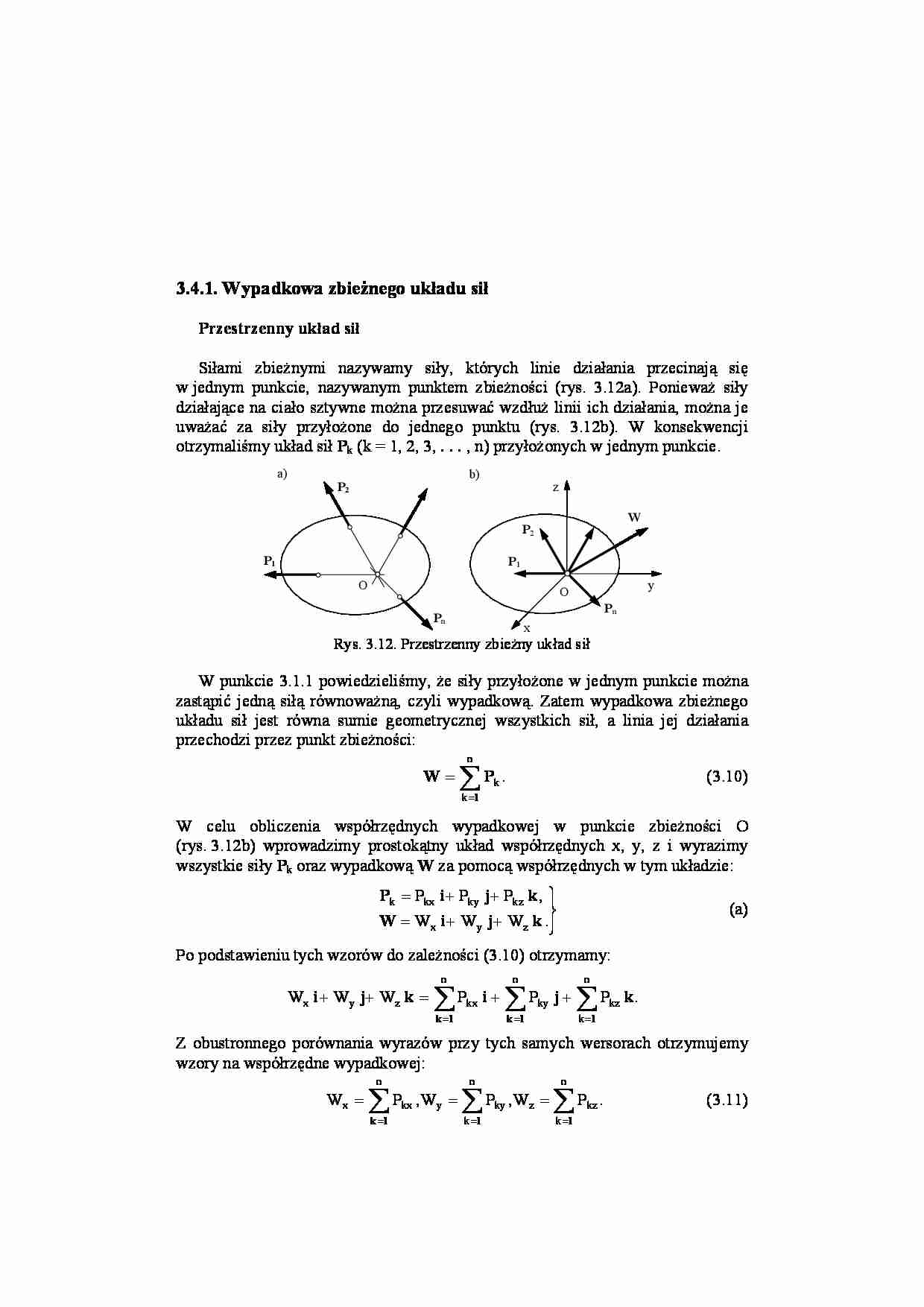
3.4.1. Wypadkowa zbieżnego układu sił Przestrzenny układ sił Siłami zbieżnymi nazywamy siły, których linie działania przecinają się w jednym punkcie, nazywanym punktem zbieżności (rys. 3.12a). Ponieważ siły działające na ciało sztywne można przesuwać wzdłuż linii ich działania, można je uważać za siły przyłożone do jednego punktu (rys. 3.12b). W konsekwencji otrzymaliśmy układ sił P k (k = 1, 2, 3, . . . , n) przyłożonych w jednym punkcie. z y P1 P2 P n O O P 1 P 2 P n W x a) b) Rys. 3.12. Przestrzenny zbieżny układ sił W punkcie 3.1.1 powiedzieliśmy, że siły przyłożone w jednym punkcie można zastąpić jedną siłą równoważną, czyli wypadkową. Zatem wypadkowa zbieżnego układu sił jest równa sumie geometrycznej wszystkich sił, a linia jej działania przechodzi przez punkt zbieżności: . n 1 k k ∑ = = P W (3.10) W celu obliczenia współrzędnych wypadkowej w punkcie zbieżności O (rys. 3.12b) wprowadzimy prostokątny układ współrzędnych x, y, z i wyrazimy wszystkie siły P k oraz wypadkową W za pomocą współrzędnych w tym układzie: ⎭ ⎬ ⎫ + + = + + = . W W W , P P P z y x kz ky kx k k j i W k j i P (a) Po podstawieniu tych wzorów do zależności (3.10) otrzymamy: . P P P W W W n 1 k kz n 1 ky n 1 kx z y x ∑ ∑ ∑ = = = + + = + + k j i k j i k k Z obustronnego porównania wyrazów przy tych samych wersorach otrzymujemy wzory na współrzędne wypadkowej: . P W , P W , P W n 1 k kz z n 1 k ky y n 1 kx x ∑ ∑ ∑ = = = = = = k (3.11) Powyższe wzory można było napisać bezpośrednio na podstawie twierdzenia, że rzut sumy wektorów na dowolną oś jest równy sumie rzutów wszystkich wektorów na tę oś (twierdzenie Charles’a). Po wyznaczeniu współrzędnych wypadkowej można wyznaczyć jej wartość liczbową (moduł) oraz kosinusy kierunkowe ze wzorów: ⎪ ⎭ ⎪ ⎬ ⎫ γ β α + + = , W W = cos , W W = cos , W W = cos , W W W W z y x 2 z 2 y 2 x (3.12) gdzie α, β i γ są kątami, które wypadkowa W tworzy odpowiednio z osiami x, y i z. Płaski układ sił Płaskim układem sił zbieżnych będziemy nazywać układ sił P k (k = 1, 2, . . . , n), których linie działania leżą w jednej płaszczyźnie i przecinają się w jednym
(…)
… współrzędnych będą równe zeru. Stąd na
podstawie wzorów (3.11) można napisać trzy skalarne równania równowagi:
n
∑ Pkx = 0,
k =1
n
∑ Pky = 0,
k =1
n
∑P
k =1
kz
= 0.
(3.17)
Powyższe warunki równowagi można wypowiedzieć słownie.
Aby przestrzenny układ sił zbieżnych był w równowadze, warunkiem
koniecznym i wystarczającym jest, by suma rzutów tych sił na każdą oś układu
współrzędnych była równa zeru.
Z równań…
… układ sił
Podobnie jak w przypadku przestrzennego zbieżnego układu sił, płaski układ sił
zbieżnych będzie w równowadze, gdy jego wypadkowa W będzie równa zeru.
Zatem wektorowy warunek równowagi będzie miał formalnie postać identyczną z
równaniem (3.16):
n
∑P
k
= 0.
k =1
Powyższemu warunkowi na podstawie wzorów (3.14) będą odpowiadały
równoważne dwa równania równowagi:
n
∑
k =1
n
Pkx = 0,
∑P
ky
= 0…
… analityczną, polegającą na wykorzystaniu
równań równowagi (3.18). Po wprowadzeniu układu współrzędnych xy w punkcie
E (rys. 3.17b) i zrzutowaniu sił na osie tego układu otrzymujemy równania
równowagi:
3
∑P
kx
= R B − R A sinα = 0,
k =1
3
∑P
ky
= R A cosα − G = 0.
k =1
Powyższe dwa równania po wyznaczeniu kąta α z twierdzenia o trzech siłach
pozwalają na wyznaczenie wartości reakcji RA i RB.
…
… w stałej
podporze przegubowej (rys. 3.17a). Wyznaczyć reakcję ściany oraz reakcję
podpory przegubowej, jeżeli odległość podpory od ściany wynosi c.
a)
b)
y
B
c)
RB
O
B
l/2
RA
α
α
C
C
G
.
RB
l/2
G
RA
G
A
E
D
A x
c
Rys. 3.17. Układ sił działających na pręt
Rozwiązanie. Pręt AB jest w równowadze pod działaniem trzech sił: ciężkości
G przyłożonej w środku ciężkości C oraz reakcji ściany RB i podpory…
…). Kąt
α jest kątem, jaki tworzy reakcja RA z siłą G. Ponieważ trójkąt sił jest trójkątem
prostokątnym, otrzymujemy:
G
, R B = G tgα.
(a)
cosα
Gdyby trójkąt sił nie był trójkątem prostokątnym, do obliczenia wartości reakcji
RA i RB należałoby zastosować twierdzenie sinusów.
Z trójkąta ADO (rys. 3.17b) mamy:
RA =
AD
c
,
=
DO 2DO
2DO
DO
DO
cosα =
=
=
2
2
2
AO
4(DO ) + c 2
(DO ) + (AD)
tgα =
Z trójkąta ABE…
... zobacz całą notatkę


Komentarze użytkowników (0)