To tylko jedna z 5 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

1.Cel ćwiczenia
Celem ćwiczenia było zarejestrowanie odpowiedzi regulatorów na standardowe wymuszenia oraz wyznaczenie rzeczywistych wartości nastaw..
2.Wstęp teoretyczny
Regulator wielofunkcyjny to urządzenie mikroprocesora, które można zaprogramować w dodatkowy sposób niż typowe regulatory PID, ponieważ mogą one wykonywać funkcje matematyczne: liniowe, nieliniowe oraz logiczne.
Regulator użyty w tym ćwiczeniu to MFU(Multi Function Unit) SIPART DR4, który można zaprogramować, aby pracował jako następujące urządzenie:
Regulator PID (jedno lub dwukanałowy)
Sterownik logiczno - sekwencyjny (obsługuje kilka obwodów naraz)
Kalkulator wielkości procesowych (oblicza np. przepływ, zbiorcze bilanse)
Pełni on funkcję dwóch regulatorów, sterownika o trzech wejściach i ośmiu wyjściach, możliwa jest równocześnie praca regulatora nad dodatkowymi operacjami matematycznymi.
Składa się on z:
Wejścia analogowego i binarnego
Wyjścia analogowego i binarnego
Panelu operatorskiego
Wbudowanego oprogramowania
3.Przebieg doświadczenia.
Regulator SIPART DR24 podłączony był do komputera, w którym za pomocą jego oprogramowania można było odpowiednio zaprogramować regulator, aby przeprowadzała odpowiednie zadania.
4.Stanowisko pomiarowe
Rys.1. Panel operatorski MFU SIPART DR24.
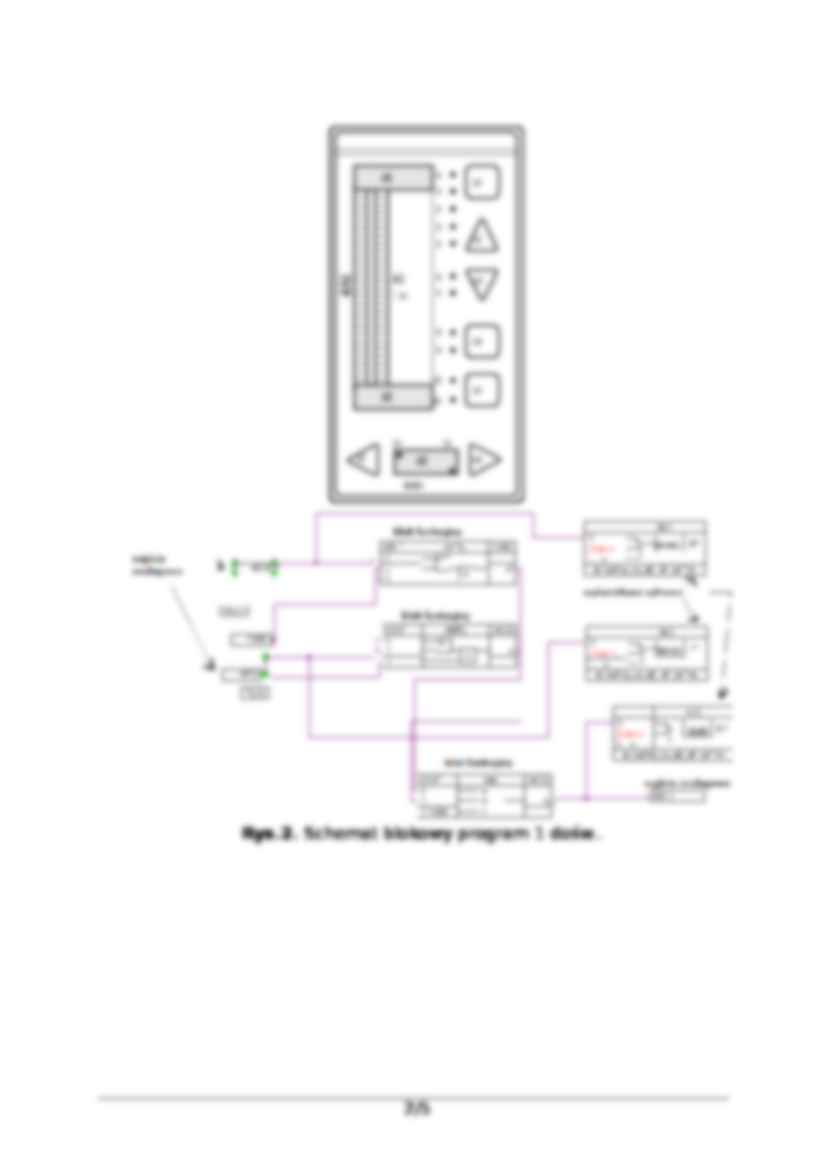
Rys.2. Schemat blokowy program 1 dośw..
Rysunek.3. Schemat blokowy programu 2 dośw.
5.Protokół pomiarowy.
Tab.1.Dane pomiarowe.
Lp.
X1
X2
Y
-
mA
mA
mA
0
32,8
8,9
134
1
9,7
5
49
2
9,7
8,8
65
3
59,7
8,9
215
6. Wyniki obliczeń
Dla 1 doświadczenia parametry bloku PL01 czyli parametr liniowy nastawiony był na 3.00 natomiast parametr linowy bloku PL02 nastawiony był na 4.00.
Z czego wynika, że na wyjściu analogowym powinna być wartość:
Wyjście analogowe= 3x wejście analogowe1 + 4xwejście analogowe2
Co z oznaczeniami ze schematu blokowego wygląda następująco:
AA1= PL01xAE1 + PL02xAE2
... zobacz całą notatkę
Komentarze użytkowników (0)