
Fragment notatki:
Pompy
W wielu procesach przetwórczych zachodzi konieczność przetłaczania cieczy. Takie
maszyny, które przetłaczają ciecze z poziomu niższego na poziom wyższy, ze zbiornika o
ciśnieniu niższym do zbiornika o ciśnieniu wyższym lub ogólniej z jednego miejsca na inne
nazywa się pompami. W przeważającej liczbie przypadków pompy napędzane są prądem
elektrycznym.
Pierwszą pompę działającą na zasadzie tłoka w III w. p.n.e. skonstruował grecki
matematyk i wynalazca Ktesibios.
W czasach, gdy nie było elektryczności pompy napędzane były ręcznie. Niektóre
nawet do dzisiaj.
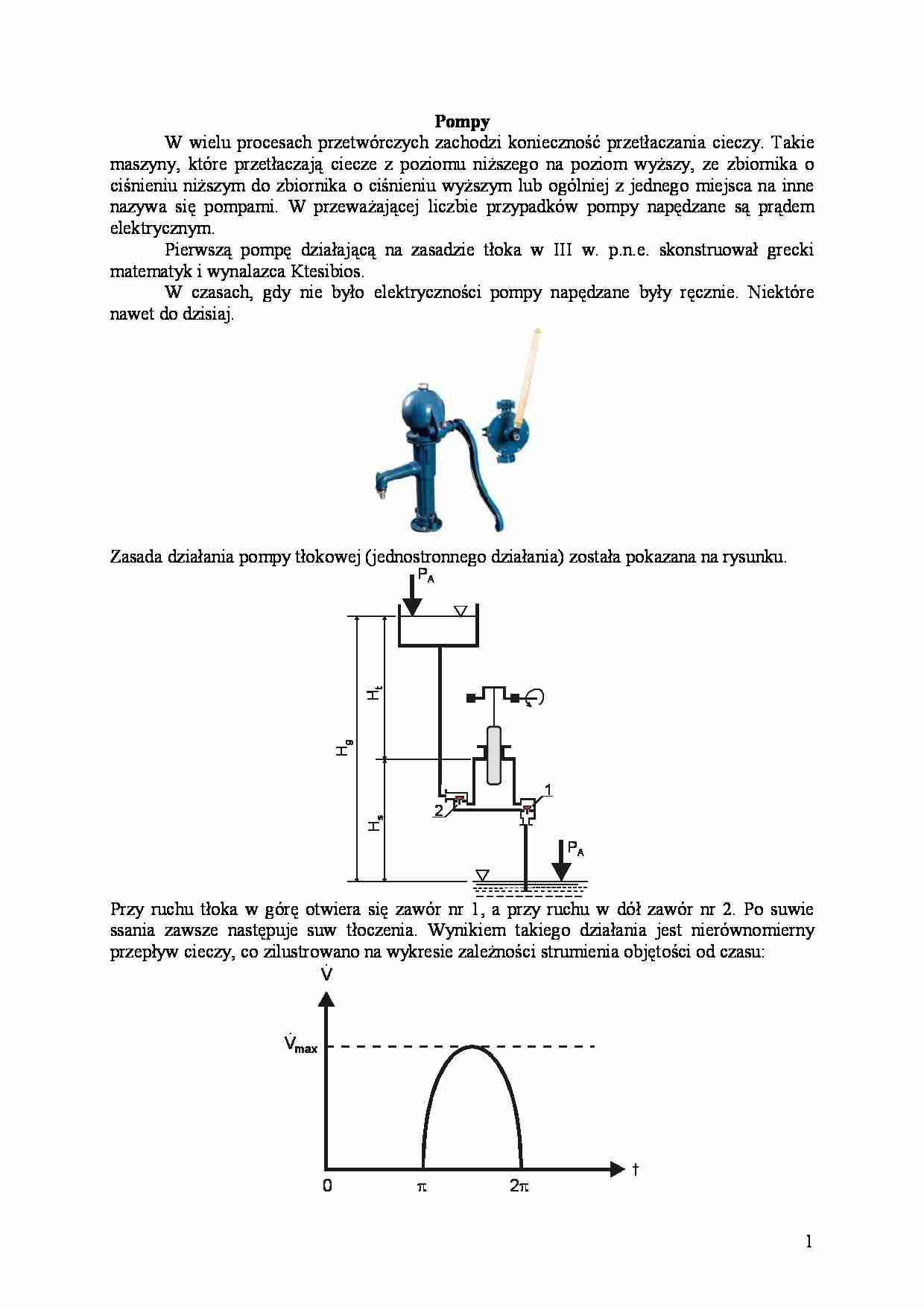
Zasada działania pompy tłokowej (jednostronnego działania) została pokazana na rysunku.
Hg
Ht
PA
1
Hs
2
PA
Przy ruchu tłoka w górę otwiera się zawór nr 1, a przy ruchu w dół zawór nr 2. Po suwie
ssania zawsze następuje suw tłoczenia. Wynikiem takiego działania jest nierównomierny
przepływ cieczy, co zilustrowano na wykresie zależności strumienia objętości od czasu:
.
V
.
Vmax
0
2
t
1
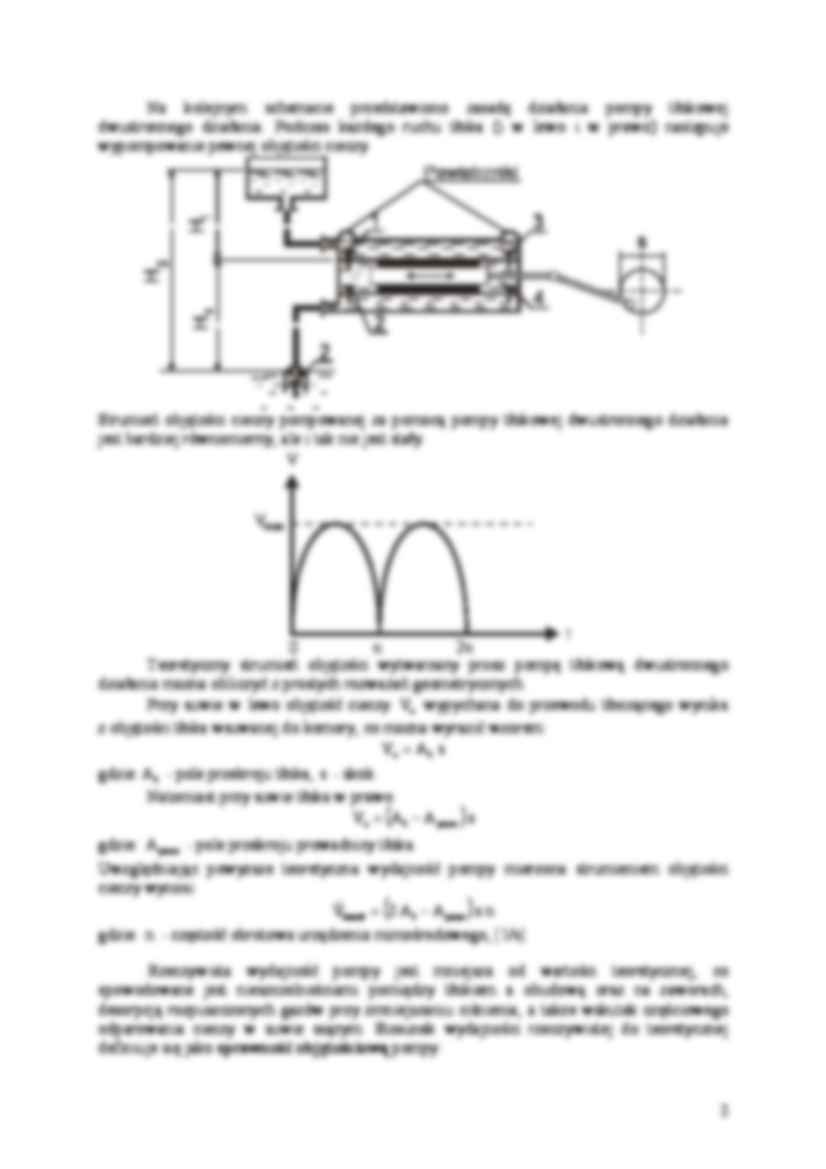
Na kolejnym schemacie przedstawiono zasadę działania pompy tłokowej
dwustronnego działania. Podczas każdego ruchu tłoka (i w lewo i w prawo) następuje
wypompowanie pewnej objętości cieczy.
Powietrzniki
3
s
Hg
Ht
1
Hs
4
2
2
Strumień objętości cieczy pompowanej za pomocą pompy tłokowej dwustronnego działania
jest bardziej równomierny, ale i tak nie jest stały.
.
V
.
Vmax
t
0
2
Teoretyczny strumień objętości wytwarzany przez pompę tłokową dwustronnego
działania można obliczyć z prostych rozważań geometrycznych.
Przy suwie w lewo objętość cieczy Vc wypychana do przewodu tłoczącego wynika
z objętości tłoka wsuwanej do komory, co można wyrazić wzorem:
Vc A t s
gdzie: A t - pole przekroju tłoka, s - skok.
Natomiast przy suwie tłoka w prawo:
Vc A t A prow s
gdzie: A prow - pole przekroju prowadnicy tłoka.
Uwzględniając powyższe teoretyczna wydajność pompy mierzona strumieniem objętości
cieczy wynosi:
Vteoret 2 A t A prow s n
gdzie: n - częstość obrotowa urządzenia mimośrodowego, [1/s]
Rzeczywista wydajność pompy jest mniejsza od wartości teoretycznej, co
spowodowane jest nieszczelnościami pomiędzy tłokiem a obudową oraz na zaworach,
desorpcją rozpuszczonych gazów przy zmniejszaniu ciśnienia, a także wskutek częściowego
odparowania cieczy w suwie ssącym. Stosunek wydajności rzeczywistej do teoretycznej
definiuje się jako sprawność objętościową pompy:
2
V
V rzecz
Vteoret
Wartość sprawności objętościowej mieści się zwykle w granicach 0,90 – 0,98, jednak dla
cieczy bardziej lepkich niż woda sprawność ta zmniejsza się nawet o 10%.
Innym rodzajem sprawności pompy jest tak zwana sprawność hydrauliczna, która
związana jest nie tylko z samą pompą ale także z siecią rurociągów, z którymi ona
współpracuje:
H
hydr u
Hc
gdzie: H u - użyteczna wysokość podnoszenia (tłoczenia),
H c - całkowita wysokość podnoszenia (tłoczenia).
Aby wyjaśnić znaczenie tych dwóch pojęć rozważmy precyzyjniej zadanie, które stoi przed
pompą. Urządzenie to musi wykonać następujące czynności:
przetransportować ciecz na pewną wysokość geometryczną: H g H s H t ,
pokonać opory przepływu w rurociągu złożonym z odcinka ssącego i tłoczącego, które
można wyrazić jako pewną wysokość h Rr h Rs h Rt ,
pokonać opory w samej pompie, wyrażone jako pewną wysokość h Rp ,
nadać cieczy odpowiednią prędkość (pokonać siły bezwładności w cieczy) h b ,
Po uwzględnieniu tego (co można także wyprowadzić z równania Bernoulliego) uzyskuje się
równanie określające całkowitą wysokość podnoszenia jaką musi wytworzyć pompa:
H c H g h Rr h Rp h b
Patrząc na korzyść użytkownika, to tylko dwa człony tego równania przynoszą
wymierny efekt, stąd w rozważaniach interesująca jest tak zwana wysokość użyteczna
definiowana jako:
H u H g h Rr
Zatem sprawność hydrauliczną można wyrazić zależnością:
H g h Rr
hydr
H g h Rr h Rp h b
Jeśli dodatkowo uwzględni się sprawność sprawność mechaniczną (straty energii w
samej pompie na łożyskach czy dławikach), to całkowitą sprawność pompy obliczy się
z zależności:
og V hydr mech
Całkowita sprawność pomp tłokowych waha się w granicach 0,65 – 0,9.
3
PA
Hs
Hg
Ht
Wyjaśnijmy dokładniej jak działa
pompa rozpatrując osobno część tłoczną
i osobno część ssącą. Rozważmy jakie
ciśnienie działa na tłok podczas suwu
tłoczenia:
p t p A H t g h Rt g h bt g
Gdyby ciśnienie w zbiorniku, do którego
tłoczona jest ciecz, było inne od
atmosferycznego,
to
zamiast
pA
w równaniu pojawiłoby się to ciśnienie.
Stąd wysokość na jaka jest tłoczona ciecz
wynosi:
p pA
Ht t
h Rt h bt
1
g
2
Z kolei ciśnienie jakie działa na tłok
podczas suwu ssania musi być mniejsze od
PA ciśnienie panującego w zbiorniku dolnym.
Jednak należy pamiętać, że wraz ze
zmniejszaniem ciśnienia zbliżamy się
coraz bardziej do punktu wrzenia cieczy.
W tym granicznym przypadku znajdziemy
się wówczas, jeśli ciśnienie działające na tłok będzie identyczne jak prężność pary nasyconej
danej cieczy P 0 , zatem:
ps p A P 0 H s g h Rs g h bs g
p A P 0 ps
h Rs h bs
g
Z tego wzoru wynika bardzo ważny wniosek: wysokość ssania nie jest dowolna, a ma
ograniczoną wartość, na którą wpływa ciśnienie w zbiorniku dolnym oraz prężność cieczy
poddawanej pompowaniu.
Hs
Zdefiniujmy wielkości charakterystyczne dla całej instalacji od punktu zasilania pompy aż
do zbiornika odbiorczego:
Różnica ciśnień w obu suwach, tj. podczas suwu ssania i suwu tłoczenia:
pk p t ps
Wysokość geodezyjna (geometryczna):
Hg H t Hs
Jeśli ciśnienia w zbiornikach zasilającym i odbiorczym są inne niż atmosferyczne i
wynoszą odpowiednio: pd oraz pg , to wprowadza się pojęcie statycznej wysokości
podnoszenia:
p pd
H st H g g
g
Opory przepływu w całej instalacji składają się z części w rurociągu ssącym i części
w rurociągu tłoczącym:
h Rr h Rt h Rs
4
Opór stawiany przez pompę oznaczmy symbolem h rp :
Ostatnim wyrażeniem jest wysokość konieczna do pokonania bezwładności cieczy:
h b h bt h bs
Zatem jeśli różnicę ciśnień p k wyrazi się jako wysokość, to uzyska się wyrażenie na
całkowitą wysokość podnoszenia pompy w postaci:
p ps
p
Hc t
h rp k h rp
g
g
pg
p
P0
H t h Rt h bt d
H s h Rs h bs h rp
g
g g
H c H st h Rr h b h rp
Zatem wysokość użyteczna dana jest równaniem:
H u H st h Rr
Dla przypomnienia wyjaśnijmy, że pierwszy składnik sumy oznacza wysokość
związaną z usytuowaniem zbiorników oraz z ciśnieniami panującymi w ich wnętrzu,
natomiast drugi jest proporcjonalny do kwadratu prędkości cieczy w rurociągu, bo przecież
wynika z równania Darcy Weisbacha.
5
Pompy wirowe
Znając wady pomp tłokowych, a w szczególności nierównomierny strumień cieczy na
wylocie opracowano wiele innych konstrukcji pomp, które spełniają ściśle określone zadania.
Można wymienić cały szereg rodzajów pomp:
pompy odśrodkowe,
pompy membranowe,
pompy krzywkowe,
pompy zębate,
pompy śrubowe,
pompy perystaltyczne,
pompy dozujące,
pompy higieniczne (sanitarne),
pompy chemoodporne,
pompy magnetyczne i wiele innych.
Wydaje się, że najpopularniejszą grupę pomp stanowią pompy odśrodkowe lub inaczej
wirowe. Najistotniejszą częścią takich pomp jest wirnik obracający się w obudowie pompy.
Poniżej pokazano kilka przykładów konstrukcji takiego wirnika:
oraz kilka przykładów pomp odśrodkowych:
6
Wydajność pompy wirowej zależy od częstości obrotowej wirnika „n”. Producenci
tych urządzeń przedstawiają te zależności w postaci funkcji wysokości użytecznej od
strumienia objętości cieczy. Przykładowa zależność jest pokazana na wykresie:
Hu
1
2
3
n
.
V
Na tym wykresie pokazano także ogólną sprawność pompy od najmniejszej 1 do
największej 3 .
Pompa wirowa współpracuje z daną siecią rurociągów tylko przy ściśle określonej
wydajności. Zatem jeśli opory rurociągu h Rr opisać za pomocą równania Darcy-Weisbacha
dla odcinków prostych i dodać opory miejscowe, to można otrzymać równanie:
L w2
w2
h Rr
op m
d 2g
2g
Jeśli w tym równaniu prędkość cieczy wyznaczy się korzystając ze strumienia objętości, to:
16 V 2 L
16 V 2
h Rr
op m
2 2 g d 5
2 2 g d 4
Wprowadźmy oznaczenia:
16
16
m
oraz 1 op m
2
5
2 gd
2 2 g d 4
to
h Rr m L 1 V 2
7
lub dla danego (ściśle zdefiniowanego) rurociągu:
h Rr V 2
wielkość nazywa się współczynnikiem oporu sieci i ma ona wymiar: s2/m5.
Zatem równanie opisujące wysokość użyteczną wytwarzaną przez pompę można
opisać zależnością:
H H V2
u
st
Hs
Hg
Ht
i nazywa się ją równaniem charakterystyki sieci. Oznaczenia w równaniach są zgodne z
wcześniej przyjętymi dla pomp tłokowych
1
Jeśli sporządzić wykres wysokości użytecznej od strumienia objętości dla wybranej
pompy (o zadanej częstości obrotowej) i wybranej sieci, to otrzyma się dwie linie
przecinające się w punkcie N, który nazywa się punktem pracy pompy.
Hu
1
N
2
Hst
Hu
.
V
.
V
Linia oznaczona numerem 1 przedstawia równanie charakterystyki sieci, a linia oznaczona
numerem 2 równanie charakterystyki pompy (które podaje producent). Punkt przecięcia obu
linii N nazywa się punktem pracy pompy. Położenie punktu pracy można zmieniać poprzez
zmianę kształtu linii 1, tj. poprzez
zmianę współczynnika oporu sieci ,
zmianę wysokości statycznej Hst (geometrycznej H g ),
lub zmieniając linię charakterystyki pompy poprzez
zmianę częstości obrotowej wirnika.
8
Hu
2
Hu
2
1
1
N2
Hu2
Hu2
Hu1
Hu1
3
N1
1
3
Hst2
N1
N2
1
Hst
Hst1
1
.
V2
.
V1
Hu
.
V
.
V2
.
V1
.
V
1
Hu1
N1
Hu2
N2
3
3’
n1
Hst
n2
.
V2
.
V1
.
V
Czasem występuje konieczność wykorzystania jednej pompy do zasilania dwóch
urządzeń. Na poniższym rysunku przedstawiono przypadek, gdy jedna pompa zasila dwa
równolegle połączone otwarte zbiorniki położone na jednakowej wysokości.
1
Hg
1
2
2
W projektowaniu takiej instalacji napotyka się na następujące problemy. Po pierwsze
należy opisać zastępczą charakterystykę tej sieci za pomocą jednego równania. Następnie
należy określić punkt pracy pompy i wreszcie należy obliczyć jaki będzie strumień cieczy
płynący do każdego ze zbiorników.
Gdyby pompa współpracowała tylko z siecią nr 1, to równanie opisujące punkt pracy
pompy przyjmuje postać:
Hu1 H g 1 V12
Gdyby z kolei współpracowała z siecią nr 2, to:
Hu 2 H g 2 V22
Zatem, jeśli pompa współpracuje z całą siecią, to równanie przyjmuje postać:
2
Hu og H g og Vog
9
Wiadomo, że ogólna wydajność pompy składa się z dwóch składowych oznaczonych
indeksem prim.
Vog V1' V2'
Jeśli opisać równaniem charakterystyki sieci współpracę z każdym ze zbiorników przy
ich jednoczesnym zasilaniu, to:
zbiornika 1: Hu og H g 1 V1' 2
Dla
zbiornika2: Hu og H g 2 V2'2
Dla
Zauważmy, że wówczas pompa wytwarza wysokość użyteczną Hu og .
Dokonajmy przekształceń:
Vog V1' V2'
Hu og H g
Hu og H g
og
1
Hu og H g
2
1
1
1
og
1
2
og
skąd:
1 2
2
1 2
Przy większej liczbie gałęzi połączonych równolegle zależność opisująca zastępczy
ogólny współczynnik oporu sieci ma postać:
1
og
2
1
i
Graficzną interpretację zasilania dwóch równolegle połączonych odcinków rurociągu przez
jedną pompę przedstawia poniższy wykres:
40
Cha
rakt
erys
tyka
po
35
30
Charakterystyka pompy
Gałąź nr1
mpy
Gałąź nr 2
Obie gałęzie
1
2
20
1’
15
2’
0
10
5
‘
V1
0
0
0,01
‘
Hu [m]
25
V
2
V1
0,02
V [m3/s]
V2
V
og
0,03
0,04
10
Jeśli sieć składa się z odcinków połączonych szeregowo, to oczywiście zastępczy
współczynnik takiej sieci jest sumą składowych odcinków:
og 1 2
Inną sytuacją jest wykorzystywanie dwóch pomp do zasilania jednego zbiornika.
Takie rozwiązanie stosuje się w dwóch różnych celach. Jeśli należy wytworzyć zwiększoną
wysokość podnoszenia, to pompy łączy się szeregowo.
Hu
1+2
2
N1
1
Nog
1
N2
2
. . .
V V Vog
2 1
.
V
Jak widać użycie dwóch pomp o charakterystykach 1 i 2 daje sumaryczną charakterystykę o
większej wysokości podnoszenia, ale wydajność zespołu pomp jest mniejszy niż suma
wydajności poszczególnych. Jeśli sieć ma bardzo stromą charakterystykę (linia 3), to
sumaryczna wydajność pompy może być bardzo zbliżona do wydajności poszczególnych
pomp pracujących pojedynczo.
Jeśli zachodzi potrzeba zwiększenia wydajności poprzez dołączenie drugiej pompy, to
należy połączyć ją równolegle. Jak widać na poniższym wykresie zastępczą charakterystykę
uzyskuje się przez sumowanie wydajności dla stałych użytecznych wysokości podnoszenia.
Także w tym przypadku sumaryczna wydajność zespołu pomp jest mniejsza od wydajności
poszczególnych pomp pracujących oddzielnie.
Hu
1
1
2
2
Nog
N1
N2
. .
.
V V2 Vog
1
1+2
.
V
11
W praktyce przemysłowej regulację (zmniejszenie) wydajności pompy najłatwiej
wykonać poprzez zdławienie na zaworze. Powstaje pytanie czy to się opłaca, a jeśli nie, to
jakie są tego koszty. Graficzna interpretacja tej sytuacji pokazana jest na wykresie:
Hu
Hu1
Hdl
Hu2
.
V2
.
V
1
.
V
Jeśli za pomocą zdławienia zaworu zmniejszony został strumień objętości z V1 do V2 ,
to przesunął się w lewo punkt pracy pompy, która teraz musi pracować przy większej
wysokości użytecznej. Jak widać na wykresie dla charakterystyki sieci oznaczonej nr 1 przy
wydajności V2 użyteczna wysokość podnoszenia może być mniejsza, zatem różnica tych
wysokości jest stratą energii i na wykresie oznaczona jest odcinkiem h dl . Gdyby obliczyć
stratę mocy związaną z dławieniem, to wyrażenie przyjmuje postać:
V g h dl
N dl 2
og
Ekonomiczniejszym sposobem jest stosowanie upustu pewnej części strumienia do
rurociągu ssącego. Natomiast najbardziej ekonomicznym sposobem jest stosowanie silników
o zmiennej częstości obrotowej, co pozwala tek dobierać ten parametr, aby uzyskiwać
założony strumień cieczy bez zwiększania oporów w sieci.
Zmiana częstości obrotowej pompy wirowej powoduje zmianę strumienia cieczy zgodnie z
równaniem:
V1 n1
V2 n 2
Powoduje także zmianę wysokości użytecznej podnoszenia:
H u1 n 1
Hu 2 n 2
2
a także zmianę zużycie mocy:
3
N1 n1
N2 n 2
Zależności te są prawdziwe tylko dla niewielkich zmian częstości obrotowych, przy których
nie następuje zmiana sprawności ogólnej pompy.
12
Przykłady różnych rozwiązań konstrukcyjnych pomp
Pompy rotacyjne
pompa krzywkowa
pompa zębata
Pompy śrubowe
13
Pompy strumieniowe
Pompy perystaltyczne
Pompy membranowe
1- elastyczna membrana, 2- prowadnica, 3- przestrzeń pompy, 4, 5- zawory.
14
... zobacz całą notatkę
Komentarze użytkowników (0)