To tylko jedna z 2 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

Adam D_browski. Notatka składa się z 2 stron.
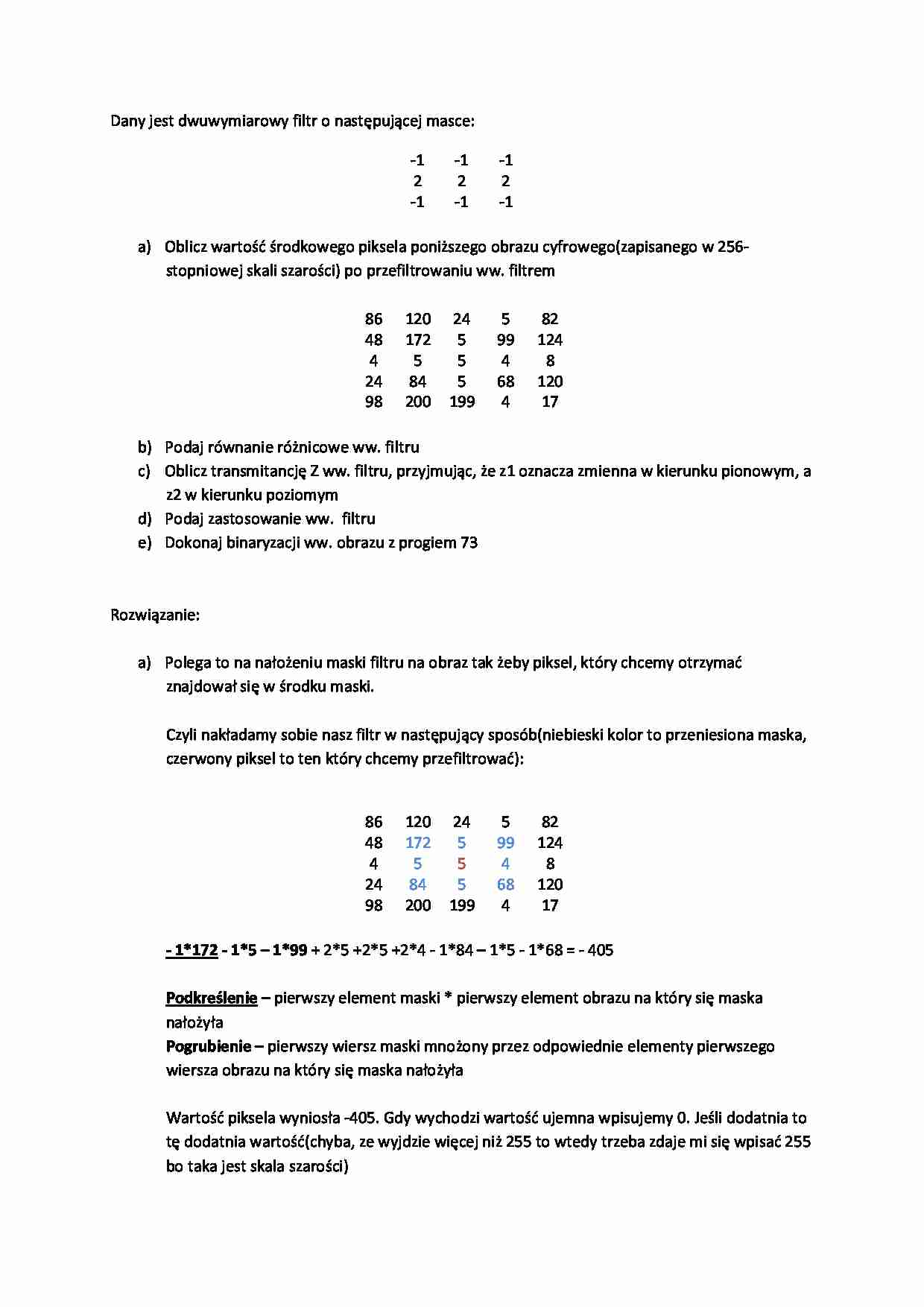
Dany jest dwuwymiarowy filtr o następującej masce: -1 -1 -1 2 2 2 -1 -1 -1 a) Oblicz wartość środkowego piksela poniższego obrazu cyfrowego(zapisanego w 256- stopniowej skali szarości) po przefiltrowaniu ww. filtrem 86 120 24 5 82 48 172 5 99 124 4 5 5 4 8 24 84 5 68 120 98 200 199 4 17 b) Podaj równanie różnicowe ww. filtru c) Oblicz transmitancję Z ww. filtru, przyjmując, że z1 oznacza zmienna w kierunku pionowym, a z2 w kierunku poziomym d) Podaj zastosowanie ww. filtru e) Dokonaj binaryzacji ww. obrazu z progiem 73 Rozwiązanie: a) Polega to na nałożeniu maski filtru na obraz tak żeby piksel, który chcemy otrzymać znajdował się w środku maski. Czyli nakładamy sobie nasz filtr w następujący sposób(niebieski kolor to przeniesiona maska, czerwony piksel to ten który chcemy przefiltrować): 86 120 24 5 82 48 172 5 99 124 4 5 5 4 8 24 84 5 68 120 98 200 199 4 17 - 1*172 - 1*5 – 1*99 + 2*5 +2*5 +2*4 - 1*84 – 1*5 - 1*68 = - 405 Podkreślenie – pierwszy element maski * pierwszy element obrazu na który się maska nałożyła Pogrubienie – pierwszy wiersz maski mnożony przez odpowiednie elementy pierwszego wiersza obrazu na który się maska nałożyła Wartość piksela wyniosła -405. Gdy wychodzi wartość ujemna wpisujemy 0. Jeśli dodatnia to tę dodatnia wartość(chyba, ze wyjdzie więcej niż 255 to wtedy trzeba zdaje mi się wpisać 255 bo taka jest skala szarości) b) y(n1,n2) = -y(n1-1,n2-1) –y(n1-1,n2) –y(n1-1,n2+1) + 2y(n1,n2-1) +2y(n1,n2) + 2y(n1,n2+1) – y(n1+1,n2-1) – y(n1+1,n2) – y(n1+1,n2+1) Zasada: n1 jest zmienna w kierunku pionowym, n2 zmienna w kierunku poziomym. Wyraz o indeksach n1, n2 jest środkowym elementem maski filtru. Mnożymy po prostu odpowiednie elementy z maski(po kolei -1, -1,-1, 2, 2, 2, -1, -1, -1) przez y(nx, ny) gdzie x i y są indeksami przesunięcia. c) Y(z,z) = -Y(z -1,z-1) –Y(z-1,z0) –Y(z-1,z1) + 2Y(z0,z-1) +2Y(z0,z0) + 2Y(z0,z1) – Y(z1,z-1) – Y(z1,z0) – Y(z 1,z1) Widać trochę analogię do pkt. b) d) Detekcja linii poziomych(tego nie jestem pewien wiec mógłby to ktoś zweryfikować) e) 1 1 0 0 1 0 1 0 1 1 0 0 0 0 0 0 1 0 0 1
... zobacz całą notatkę
Komentarze użytkowników (0)