To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Obliczanie współrzędnych punktów i ocena dokładności sieci.
Obliczenia i wyrównania współrzędnych punktów omawianych sieci oraz ocenę ich
dokładności dokonuje się metodami ścisłymi: pośredniczącą lub zawarunkowaną. Stosując
metodę pośredniczącą obliczanie współrzędnych rozpoczyna się od pierwszego z punktów
nawiązania. Azymut pierwszego z boków nowej sieci oblicza się na podstawie kąta nawiązania
znanej już sieci. Mając azymut pierwszego boku nowo zakładanej sieci, pomierzone długości
oraz kąty oblicza się współrzędne przybliżone wszystkich punktów. Boki, których długości nie
zostały pomierzone należy przed obliczeniem współrzędnych wyliczyć (np. z tw. Sinusowego).
Następnym etapem obliczeń jest ułożenie równań obserwacyjnych dla wszystkich obserwacji w
sieci (obserwacje długości i kątów).
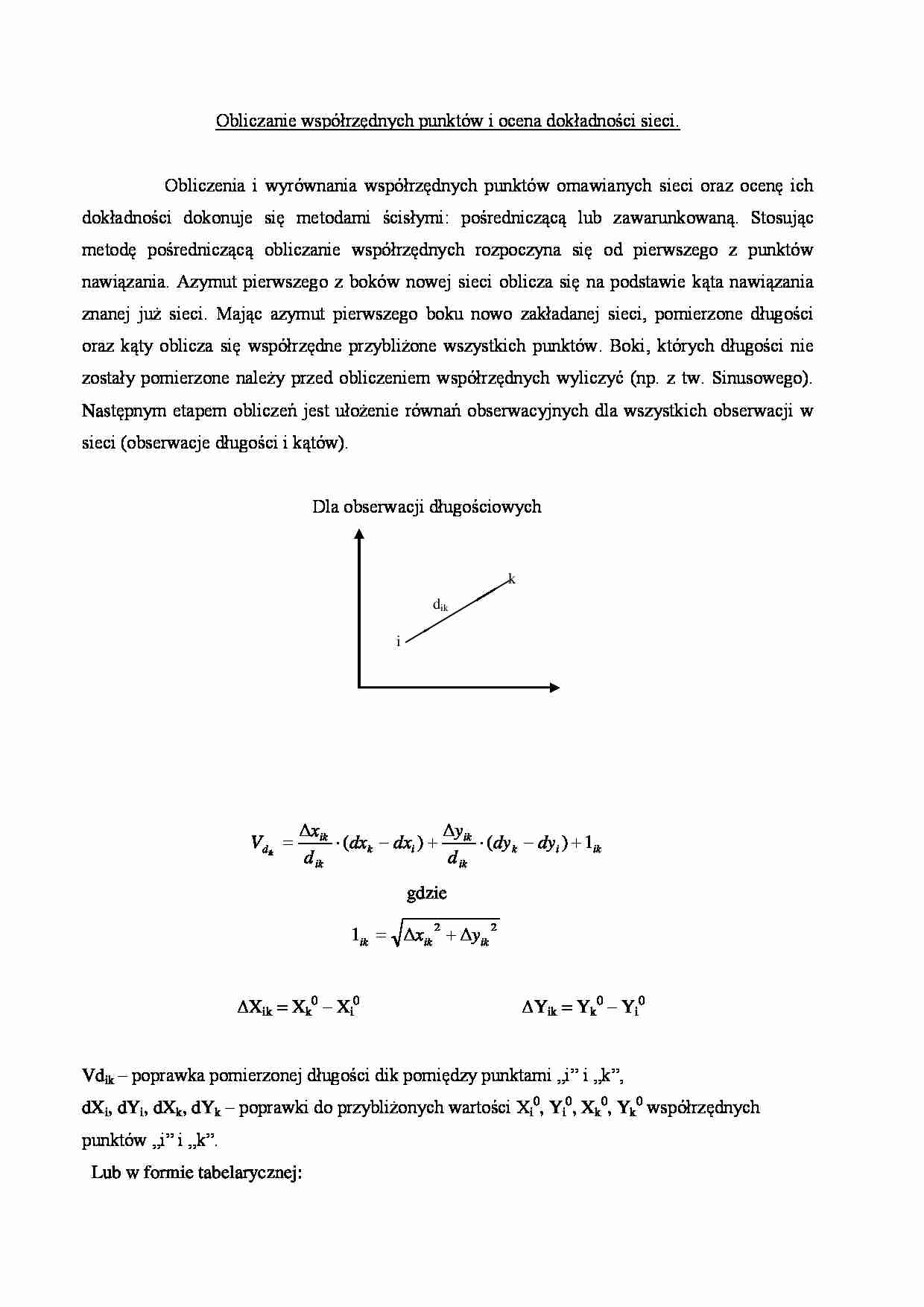
Dla obserwacji długościowych
k
dik
i
Vdik
xik
y
(dxk dxi ) ik (dy k dyi ) 1ik
d ik
d ik
gdzie
1ik xik yik
2
Xik = Xk0 – Xi0
2
Yik = Yk0 – Yi0
Vdik – poprawka pomierzonej długości dik pomiędzy punktami „i” i „k”,
dXi, dYi, dXk, dYk – poprawki do przybliżonych wartości Xi0, Yi0, Xk0, Yk0 współrzędnych
punktów „i” i „k”.
Lub w formie tabelarycznej:
Vd ik
dxi
dyi
dx k
dy k
cos ik sin ik cos ik sin ik
1ik
Dla obserwacji kątowych
x
L
a
P
C
y
Równania obserwacyjne przybierają postać:
V LCP
yCP
x
y
x
(dx P dxC ) 2CP (dy P dyC ) 2CL (dx L dxC ) 2CL (dy L dyC ) 1 LCP
2
d CP
d CP
d CL
d CL
gdzie 1 LCP arctg
yCP
y
arctg CL LCP
xCP
xCL
VLCP – poprawka kąta LCP pomierzonego na punkcie C.
Lub w formie tabelarycznej:
V LCP
dx L
dy L dx P
dy P dxC
dyC
AL
BL AP
BP ( AL AP ) ( BL BP )
1 LCP
gdzie:
AL
xCL
x
y
y
; AP 2CP ; BL 2CL ; BP 2CP .
2
d CL
d CP
d CL
d CP
Dalszy tok postępowania:
Niezależną sieć kątową, długościową lub kątowo-długościową można obliczyć
omówiona wyżej metodą pośredniczącą lub zawarunkowaną. Przeprowadzając wyrównanie
obserwacji metodą zawarunkowaną współrzędne dowolnego punktu sieci oraz orientację boku
przyjmuje się w drugim etapie obliczeń podczas rachunku ostatecznych współrzędnych. Zgodnie
z teorią najmniejszych kwadratów, suma kwadratów poprawek do pomierzonych wielkości ma
być najmniejsza, czyli [vv]=min, [pvv]=min, a jednocześnie mają być spełnione warunki
geometryczne sieci.
W sieciach występują trzy zasadnicze grupy warunków:
1) warunki trójkątowe ( figur ), polegające na tym, że suma kątów w trójkącie powinna być
równa 1800
2) warunki horyzontu polegają na tym, że suma wszystkich katów na stanowisku powinna być
równa 3600
3) warunki boków (sinusowe) polegające na spełnieniu zależności między bokami i katami na
podstawie twierdzenia sinusów.
Przed przystąpieniem do wyrównania należy obliczyć ogólna ilość warunków w sieci,
pamiętając o tym, że ilość ta jest równa ilości spostrzeżeń nadliczbowych. Następnie oblicza się
ilość warunków w grupach. Ilość ta zależy od kształtu sieci i ilości pomierzonych
... zobacz całą notatkę
Komentarze użytkowników (0)