To tylko jedna z 32 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

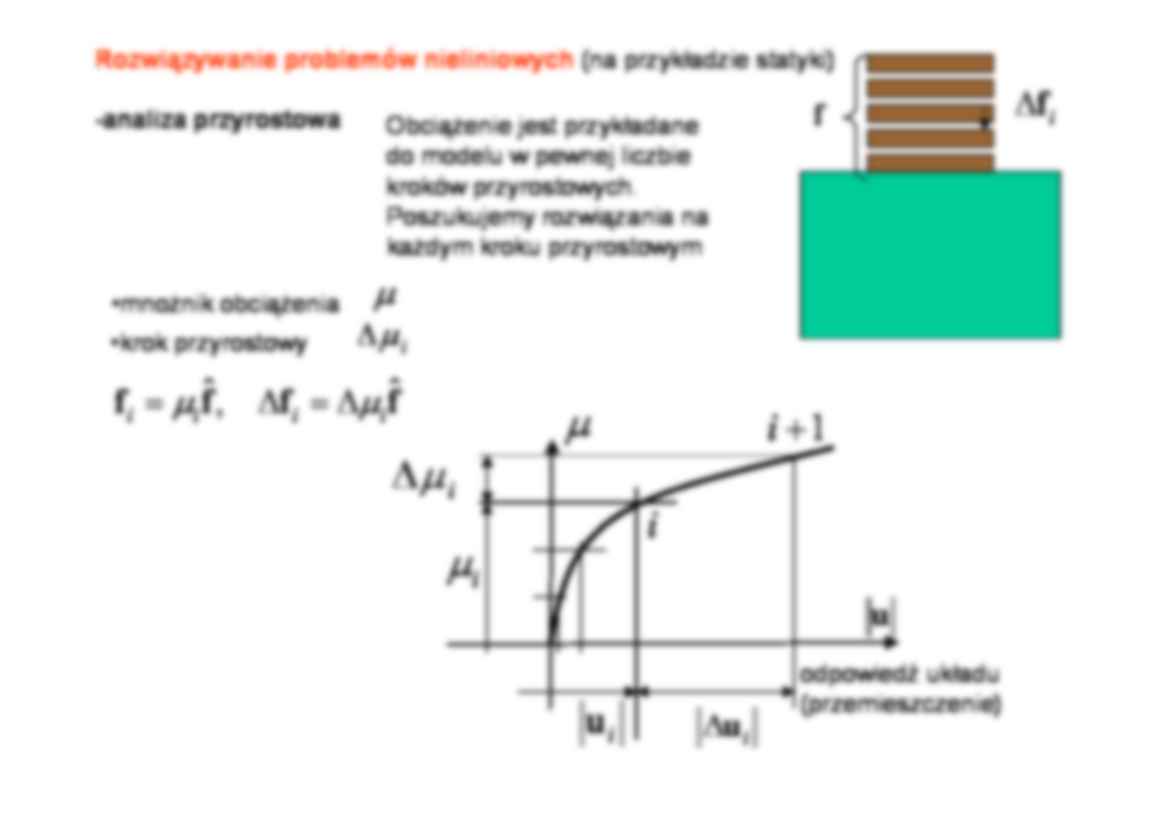
Analiza zagadnień nieliniowych w MES Ogólnie: Model liniowy wszystkie równania i warunki brzegowe są liniowe ⎩ ⎨ ⎧ = + = + ) ( ) ( ) ( ) ( ) ( x aM ax M y M x M y x M Są na ogół tylko przybliżeniem (czasem wystarczającym). Nie uwzględnia się w nich zmian cech modelu wywołanych przez zmienne stanu (np. sztywność może zależeć od naprężeń). jednorodność addytywność →zasada superpozycji każda przyczyna może być analizowana oddzielnie, wynik ich łącznego oddziaływania jest sumą ( ) n n n n M M x x M M x M M x M + + = + + → ⎪ ⎭ ⎪ ⎬ ⎫ = = L L L 1 1 1 1 ) ( ) ( Źródła nieliniowości w statyce kontinuum σ geometryczna - materiałowa na ogół nie występuje w konstrukcjach hydro- i geo- technicznych występuje powszechnie, dla materiałów takich jak: beton, grunt, skała ε Modele nieliniowe nie zachodzi zasada superpozycji ( ) ( ) n n x M x M x x M + + ≠ + + L L ) ( 1 1 strukturalna kontakt dwóch ciał, inne więzi nieliniowe (jednostronne) duże przemieszczenia lub odkształcenia Rozwiązywanie problemów nieliniowych (na przykładzie statyki) -analiza przyrostowa •mnożnik obciążenia μ •krok przyrostowy i μ Δ f f f f ˆ , ˆ i i i i μ μ Δ = Δ = odpowiedź układu (przemieszczenie) Obciążenie jest przykładane do modelu w pewnej liczbie kroków przyrostowych. Poszukujemy rozwiązania na każdym kroku przyrostowym μ i μ i μ Δ i u i u Δ u i 1 + i i f Δ f Algorytmy dla pojedynczego kroku przyrostowego znamy : stan układu w chwili i, przyrost obciążenia na kroku i szukamy : stan układu w chwili i+1 i f Δ ( ) ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⇒ ⎢ ⎣ ⎡ + = Δ + = Δ Δ + = = + + + STOP else i i n SolveNonLi if NStep i for i i i i i i i i 1 i dla ukladu stanu zapis i wyniki 1 , , 0 1 1 1 u u u u f f f f Uwaga: Procedura SolveNonLin może nie dać wyniku (rozbieżność). Należy wtedy obejrzeć wyniki i zdecydować: •zmniejszyć krok •nic nie robić \ osiągnieto np. nośność Przypomnienie - metoda Newtona rozwiązywania układów równań nieliniowych metoda zbieżna, przy pewnych założeniach o funkcji g (wypukłość, ograniczoność) ( ) ( ) ( ) ( ) ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + = →
(…)
…
Algorytmy dla pojedynczego kroku przyrostowego, c.d.
metoda Newtona full Newton-Raphson
w stanie równowagi: f INT = ∑ A eT ∫ B eT σ dV
e Ωe
na kroku i f i = f INT i siły zewnętrzne = s. wewnętrzne
na kroku i+1 f i +i = f INT i +1 (Δu i ), Δu i − nieznane (szukane)
procedura iteracyjna
Δu k i = 0 1 przybliżenie
∂f INT
( )
f i +1 − f INT Δu i + δu ≅ f i +1 − f INT Δu
k
( k
i ) − ∂Δu ⋅ δu = 0
rozwinięcie
w szereg Taylora:
Δu k i
∂f INT
∂Δu
( )
⋅ δu = f i +1 − f INT Δu k i ⇔ K T ⋅ δu = f i +1 − ∑ ( )
A eT ∫ B eT σ Δu k i dV
Δu k i e Ωe
styczna macierz siły wewnętrzne zależne
sztywności od aktualnych naprężeń
Δu k +1i = Δu k i + δu
if ( δu < TOL ∧ Δf < TOL ) → NEXT STEP sprawdzenie dokładności
k = k +1 przemieszczeń i sił
Nieliniowość materiałowa (fizyczna). Implementacja
macierz sztywności styczna
∂f INT…
…
naprężeń w chwili poprzedniej i przyrostu odkształceń
iterowanych na danym kroku:
(
σ ik = σ σ io , Δε ik )
wektor sił wewnętrznych od aktualnych
naprężeń
( )
f k INT i = ∑ A eT ∫ B eT σ σ io , Δε ik dV
e Ωe
Implementacja modelu sprężysto – plastycznego (w punkcie całkowania Gausa)
Dane: Poszukiwane:
naprężenie w stanie i σi , naprężenia w chwili i+1 σ i +1 = σ (σ i , Δε i )
przyrost odkształcenia Δε i ∂σ…
… jest tak samo jako stosunek
sił utrzymujących do sił czynnych działających wzdłuż powierzchni
poślizgu w momencie utraty stateczności
⎛ c' tg ( φ' ) ' ⎞ 1
Tc = ∫ τ dΓ = ∫ ⎜ + σ n ⎟ dΓ = Tu
Γ⎝ ⎠
Γ
SF SF SF
nieznane Γ
Analiza stateczności metodą redukcji c-fi
Poszukuje się czynnika SF (współczynnika bezpieczeństwa) :
SF
SF
Określanie współczynnika stateczności metodą
proporcjonalnej redukcji parametrów…
... zobacz całą notatkę
Komentarze użytkowników (0)