To tylko jedna z 7 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
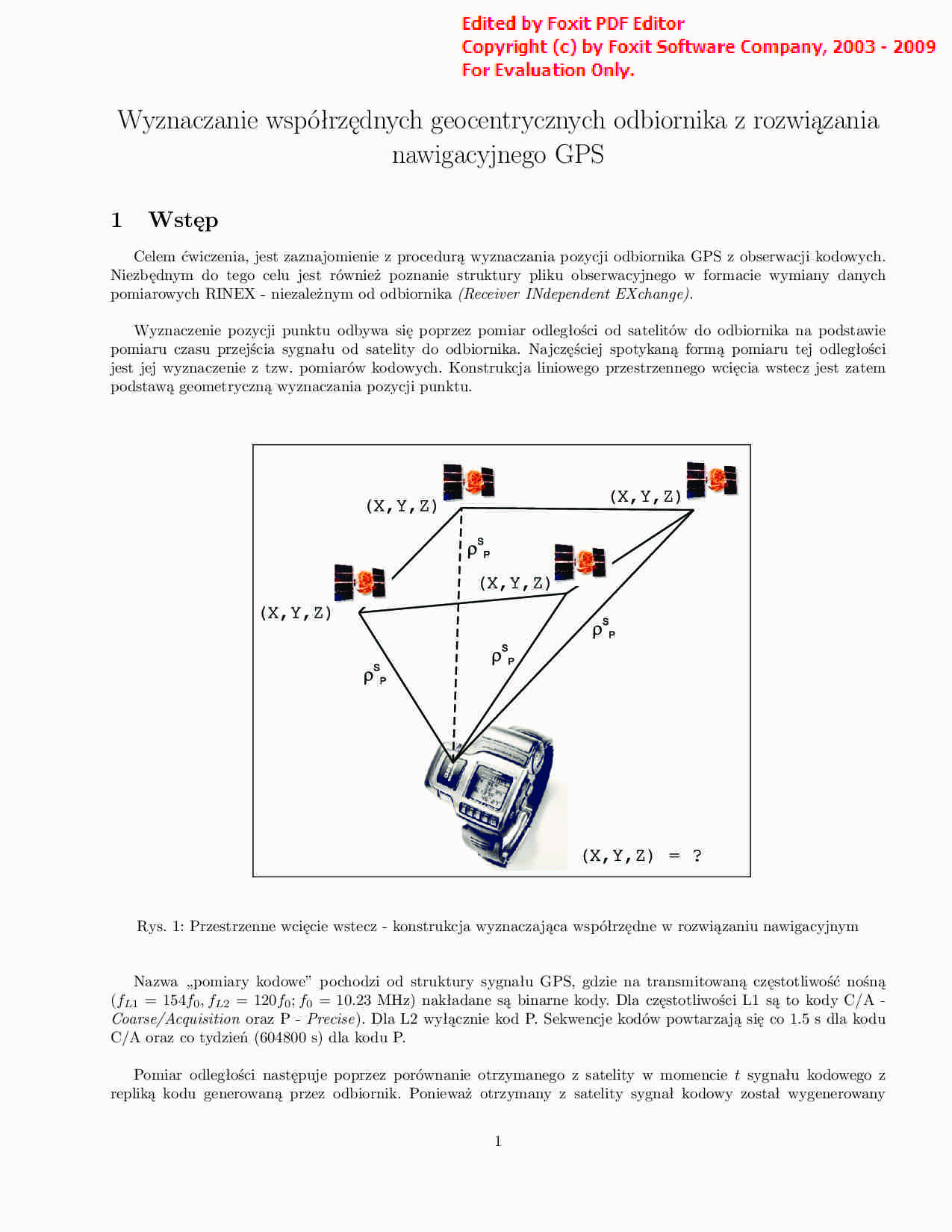


Wyznaczanie współrzędnych geocentrycznych odbiornika z rozwiązania nawigacyjnego GPS 1 Wstęp Celem ćwiczenia, jest zaznajomienie z procedurą wyznaczania pozycji odbiornika GPS z obserwacji kodowych. Niezbędnym do tego celu jest również poznanie struktury pliku obserwacyjnego w formacie wymiany danych pomiarowych RINEX - niezależnym od odbiornika (Receiver INdependent EXchange) . Wyznaczenie pozycji punktu odbywa się poprzez pomiar odległości od satelitów do odbiornika na podstawie pomiaru czasu przejścia sygnału od satelity do odbiornika. Najczęściej spotykaną formą pomiaru tej odległości jest jej wyznaczenie z tzw. pomiarów kodowych. Konstrukcja liniowego przestrzennego wcięcia wstecz jest zatem podstawą geometryczną wyznaczania pozycji punktu. Rys. 1: Przestrzenne wcięcie wstecz - konstrukcja wyznaczająca współrzędne w rozwiązaniu nawigacyjnym Nazwa „pomiary kodowe” pochodzi od struktury sygnału GPS, gdzie na transmitowaną częstotliwość nośną ( fL 1 = 154 f 0 , fL 2 = 120 f 0; f 0 = 10 . 23 MHz) nakładane są binarne kody. Dla częstotliwości L1 są to kody C/A - Coarse/Acquisition oraz P - Precise ). Dla L2 wyłącznie kod P. Sekwencje kodów powtarzają się co 1.5 s dla kodu C/A oraz co tydzień (604800 s) dla kodu P. Pomiar odległości następuje poprzez porównanie otrzymanego z satelity w momencie t sygnału kodowego z repliką kodu generowaną przez odbiornik. Ponieważ otrzymany z satelity sygnał kodowy został wygenerowany 1 wcześniej t 0, kody nie „pokryją się ”. Znając częstość próbkowania kodu (1.023 MHz dla C/A oraz 10.23 MHz dla P) możemy określić czas przebiegu sygnału od satelity do odbiornika: τ S P = t − t 0 (1) a tym samym odległość: ρ S P = τ S P ∗ c (2) Mając na uwadze wpływ czynników instrumentalnych, atmosferycznych i geometrycznych wyznaczona w powyższy sposób odległość ρS P satelity S od punktu P będzie nosić nazwę „pseudoodległości” . Podstawowe równanie obserwacji kodowych jest następujące: P S P ( t ) = ρ S P + I S P + T S P + c ( dt S ( t − τ S P ) − dtP ( t )) − e S P (3) I to wpływ jonosfery, T - troposfery, c = 299792458 [m/s] to prędkość światła w próżni, dtS to błąd zegara satelity, dtP - błąd zegara odbiornika, e to pozostałe nieuwzględnione błędy. Równanie (3) linearyzujemy po ominięciu wpływów atmosferycznych do postaci: − XS − XP P S P x − Y S − YP P S P y − ZS − ZP P S P z + 1( cdtP ) = P S P ( obs )
(…)
… dla obydwu częstotliwości nośnych
Dla każdego momentu pomiaru (epoki) zapisywany jest zbiór danych rozpoczynający się wierszem np.:
01
9 11
8 00 00.0000000
0
8G20G07G01G29G04G25G11G13
-0.001165355
Trzy początkowe wartości to data 2001-09-11, potem godzina 8:00:00.0000000. Następnie interesujący nas zbiór
nazw satelitów obserwowanych w danej epoce. Rozpoczyna się on zawsze od liczby widocznych satelitów…
…, dowiedź, że równanie (3) w połączeniu z równaniem (8), po linearyzacji
da równanie (4).
2. Oblicz jak długo trwa przebieg sygnału od satelity do odbiornika, gdy pomierzona pseudoodległość wynosi
20200 km,
3. Porównaj otrzymane współrzędne ze wzorcowymi, odpowiedz na pytanie, skąd pochodzi różnica,
4. W jaki sposób korzystając ze zbioru danych w twoim pliku obserwacyjnym RINEX, możnaby podnieść dokładność…
…)
Wektor L składa się z różnic pseudoodległości pomierzonych ρS (pochodzących z pliku RINEX ) oraz odległości
P
S
obliczonych ze współrzędnych PP :
S
L = ρS − P P
P
S
PP =
2
(7)
2
2
(X S − XP ) + (Y S − YP ) + (Z S − ZP )
ρS
P
(8)
Należy tu jednak pamiętać, że pseudoodległości pomierzone
w macierzy A oraz wektorze L należy przy
pierwszej iteracji zredukować o błąd zegara satelity wyznaczony w pliku orbit…
… z macierzy kosinusów kierunkowych pseudoodległości: A, definiującej geometryczny układ odbiornika
ˆ
i satelitów, możemy uzyskać macierz kowariancji Cx wyznaczanych parametrów dx:
2
σX
σXY
σXZ σXcdt
2
σ
−1
σY
σY Z σY cdt
(15)
Cx = AT A
= YX
2
σZX
σZY
σZ
σZcdt
2
σcdtX σcdtY σcdtZ σcdt
w układzie geocentrycznym ECEF. Macierz ta, zawiera informację o jakości geometrycznego wyznaczenia…
... zobacz całą notatkę
Komentarze użytkowników (0)