Systemy
System liniowy:
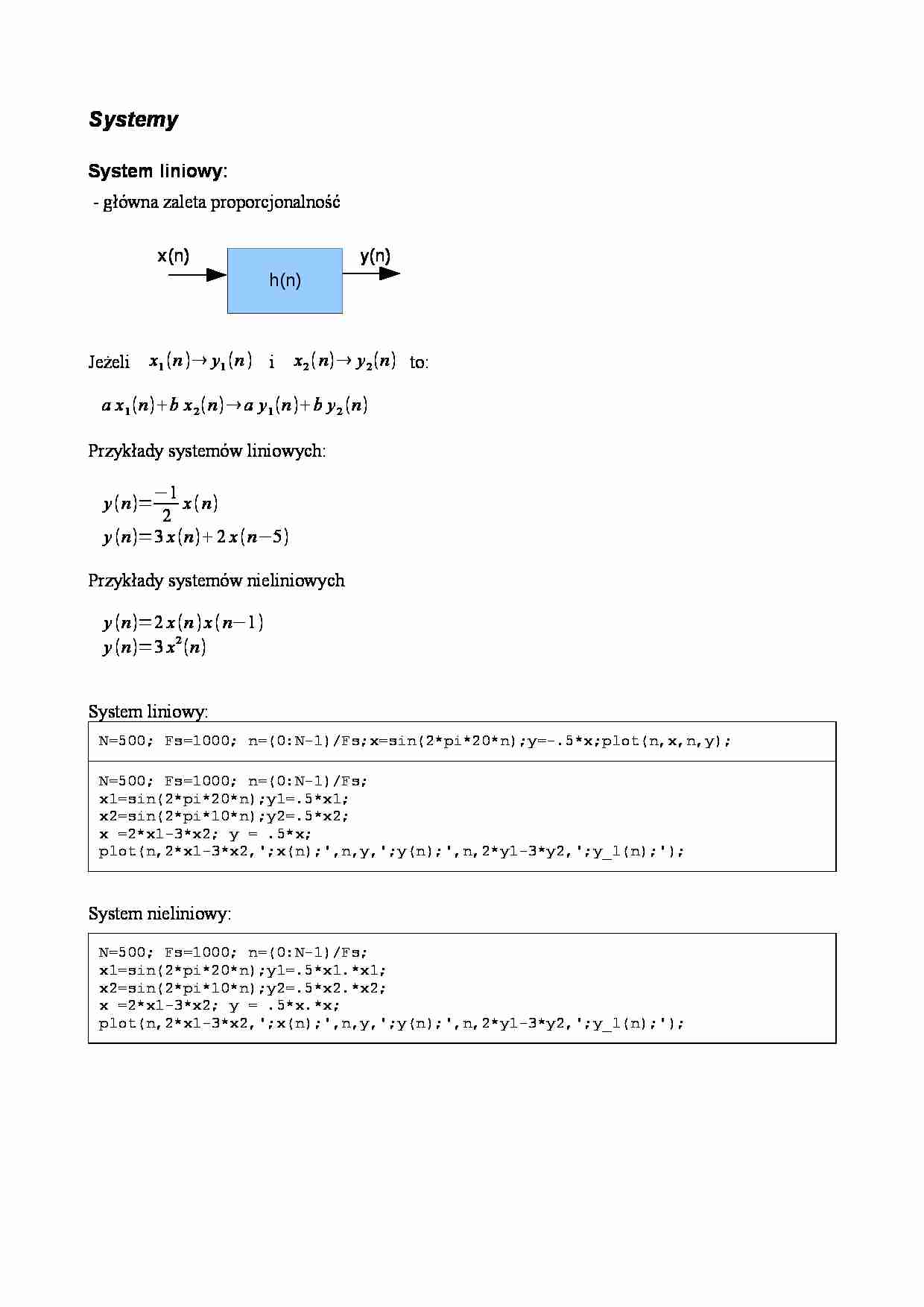
- główna zaleta proporcjonalność
x(n)
y(n)
h(n)
Jeżeli
x 1 n y 1 n i
x 2 n y 2 n to:
a x 1 nb x 2 n a y 1 nb y 2 n
Przykłady systemów liniowych:
−1
x n
2
y n=3 x n2 x n−5
y n=
Przykłady systemów nieliniowych
y n=2 x n x n−1
y n=3 x 2 n
System liniowy:
N=500; Fs=1000; n=(0:N-1)/Fs;x=sin(2*pi*20*n);y=-.5*x;plot(n,x,n,y);
N=500; Fs=1000; n=(0:N-1)/Fs;
x1=sin(2*pi*20*n);y1=.5*x1;
x2=sin(2*pi*10*n);y2=.5*x2;
x =2*x1-3*x2; y = .5*x;
plot(n,2*x1-3*x2,';x(n);',n,y,';y(n);',n,2*y1-3*y2,';y_l(n);');
System nieliniowy:
N=500; Fs=1000; n=(0:N-1)/Fs;
x1=sin(2*pi*20*n);y1=.5*x1.*x1;
x2=sin(2*pi*10*n);y2=.5*x2.*x2;
x =2*x1-3*x2; y = .5*x.*x;
plot(n,2*x1-3*x2,';x(n);',n,y,';y(n);',n,2*y1-3*y2,';y_l(n);');
System inercyjny(bezwładnościowy) / nieinercyjny
Przykłady:
– bezinercyjny
y n=1.1x n
N=20;n=(0:N-1);x=[zeros(1,N/2),ones(1,N/2)];y=1.1*x;plot(n,x,'b*',n,y,'rx')
–
inercyjny
y n=0.5x n0.3x n−10.1x n−20.1x n−2
N=50;Fs=200;n=(0:N-1)./Fs;f=5;x=square(2*pi*f*n,.5);
yb=1.1*x;
yi=.5*x+.3*[0,x(1:end-1)]+.1*[0,0,x(1:end-2)]+.1*[0,0,0,x(1:end-3)];
plot(n,x,'r+',n,yb,'b*',n,yi,'go');
System niezmienny w czasie / zmienny w czasie / adaptacyjny
x(n)
y(n)
h(n)
Szereg Volterry (Volterra series) – modelowanie systemów nieliniowych
Najczęściej używany model systemu dyskretny liniowy inercyjny niezmienny w czasie
LTI – ang. Linear Time Invariant
Odpowiedź impulsowa
B=[1 .9 -1.2 3 2 .1 -1 -1.5 -.9]; A=1; % nieznany system
N=20;n=(1:N);x=zeros(1,N);x(1)=1;
% pobudzenie
y = filter(B,A,x);plot(n,x,'b*',n,y,'r');
Czy na podstawie obserwacji odpowiedzi systemu (kolor czerwony) jesteśmy w stanie wyznaczyć
nasz system - czyli h(n) ?
Transformata Z
Z {x kT }=Z {x n}= X z ,
gdzie
x n∈ℝ N ,
X z ∈ℂ N
N −1
X z = ∑ x n z−n
n=0
Transformata Z istnieje tylko dla funkcji które nie rosną szybciej niż funkcja wykładnicza e n
czyli np. dla x n=n ! lub x n=e n transformata Z nie istnieje !!!
2
Region zbieżności ROC
{ ∣∑
∣ }
∞
ROC = z :
x n z−n ∞
n=−∞
ROC – to zbiór punktów zespolonej płaszczyzny Z spełniający powyższy warunek
Związek między transformatą Z a transformatą Fouriera
(omówić z =r e j i przypadek kiedy r =1 ∣z∣=1 )
Własności transformaty Z
●
Liniowość
Z [a x 1 nb x 2 n ]=a X 1 z b X 2 z
●
przesunięcie w czasie
Z {x n−k }=z
Z {x nk }=z
●
−k
k
X z
{ X z−∑
k−1
n=0
x n z
−k
}
odwrócenie czasu
−1
Z {x −n}= X z
●
Transformata sumy
Z
●
{∑
M −1
n=0
}
x n =
z
X z
z−1
Transformata różnicy
Z [ x n1− x n]= z − 1 X z − x 0
●
Transformata iloczynu
Z {x n y n}= X z ∗Y z
●
Transformata splotu
Z {x n∗y n}= X z Y z
Tabela potrzebnych transformat
x(n)
Transfomata Z
n
Obszar zbieżności ROC
z ∈ℂ
1
n−k
z −k
z ≠0
u n
1
−1
1−z
∣z∣1
Splot
∞
y t= ∫ h x t − d
−∞
i konsekwentnie jeżeli mamy h n∈ℝM oraz
x n∈ℝ N
M
... zobacz całą notatkę


Komentarze użytkowników (0)