
Fragment notatki:
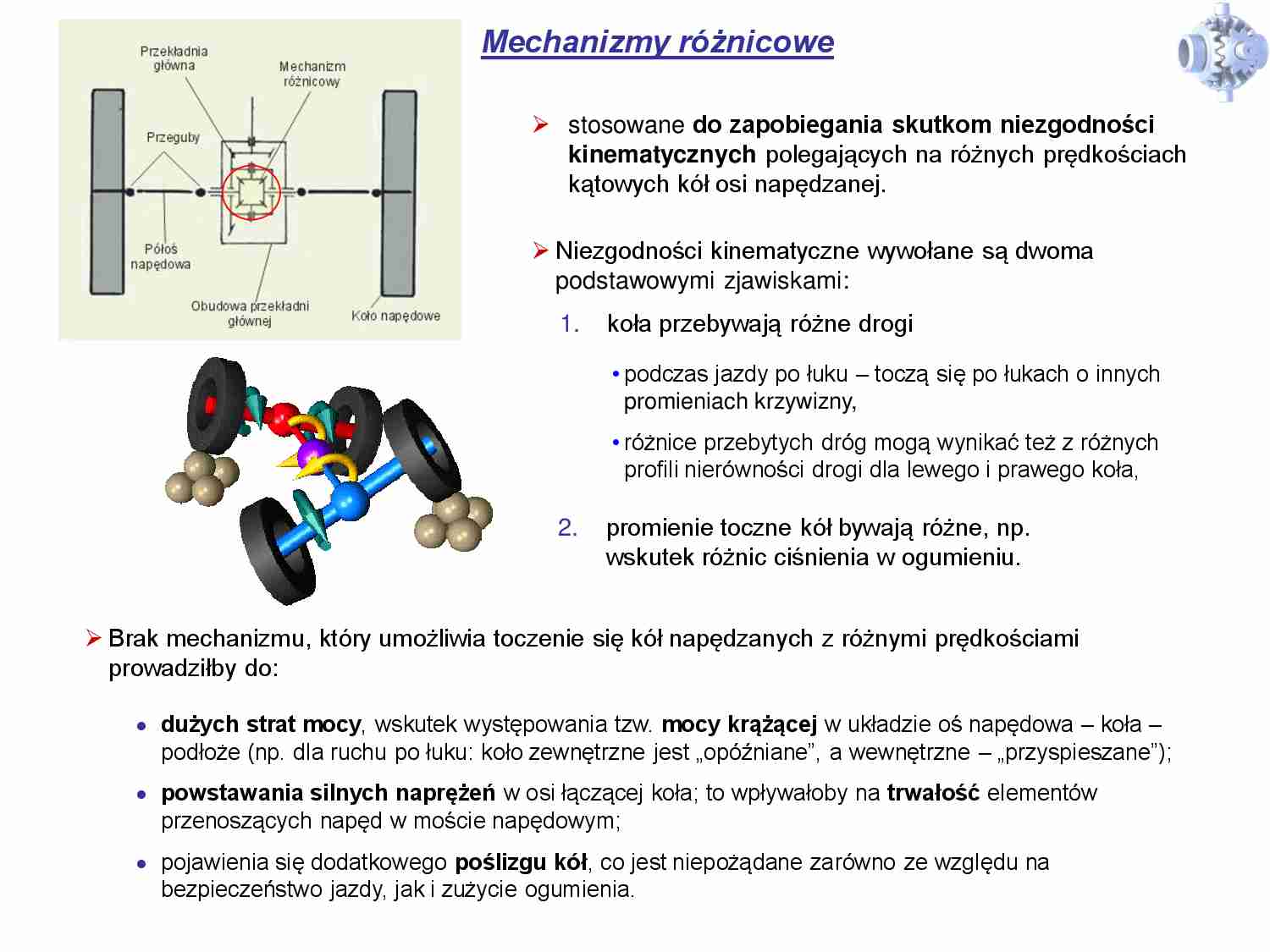
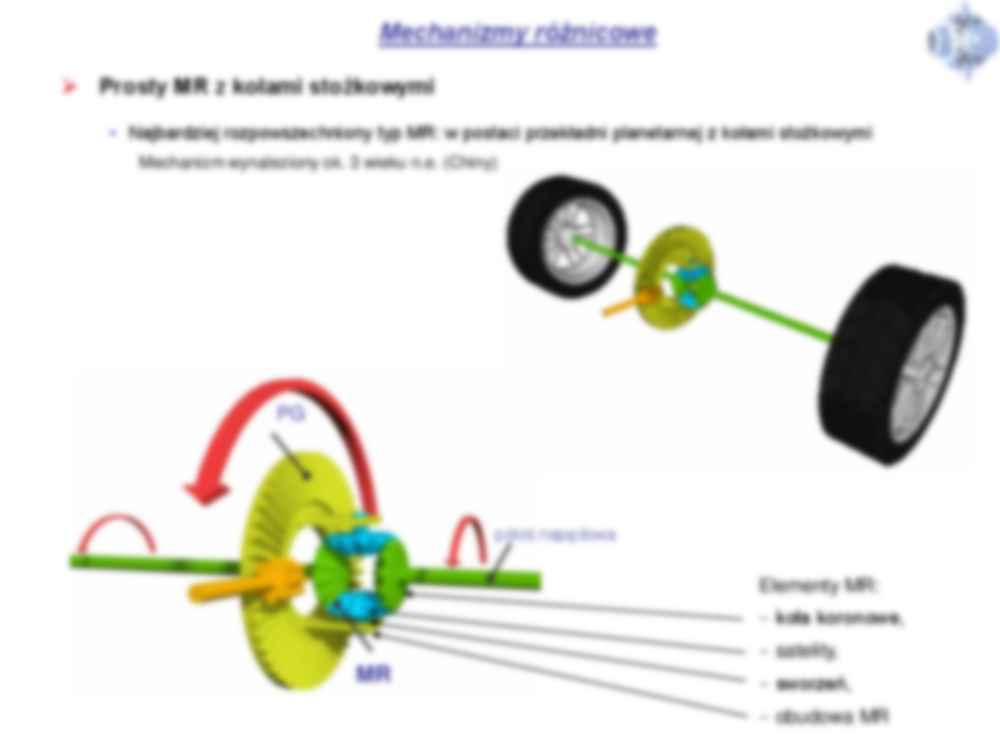
Mechanizmy różnicowe 1. koła przebywają różne drogi stosowane do zapobiegania skutkom niezgodności kinematycznych polegających na różnych prędkościach kątowych kół osi napędzanej. Niezgodności kinematyczne wywołane są dwoma podstawowymi zjawiskami: • podczas jazdy po łuku – toczą się po łukach o innych promieniach krzywizny, • różnice przebytych dróg mogą wynikać też z różnych profili nierówności drogi dla lewego i prawego koła, 2. promienie toczne kół bywają różne, np. wskutek różnic ciśnienia w ogumieniu. Brak mechanizmu, który umożliwia toczenie się kół napędzanych z różnymi prędkościami prowadziłby do: dużych strat mocy , wskutek występowania tzw. mocy krążącej w układzie oś napędowa – koła – podłoże (np. dla ruchu po łuku: koło zewnętrzne jest „opóźniane”, a wewnętrzne – „przyspieszane”); powstawania silnych naprężeń w osi łączącej koła; to wpływałoby na trwałość elementów przenoszących napęd w moście napędowym; pojawienia się dodatkowego poślizgu kół , co jest niepożądane zarówno ze względu na bezpieczeństwo jazdy, jak i zużycie ogumienia. Mechanizmy różnicowe Można wyróżnić 2 podstawowe grupy mechanizmów różnicowych (MR): I. Mechanizmy różnicowe w postaci przekładni planetarnych a. zębate, - z kołami stożkowymi, - z kołami walcowymi, II. mechanizmy różnicowe krzywkowe b. ślimakowe. Mechanizmy różnicowe • Najbardziej rozpowszechniony typ MR: w postaci przekładni planetarnej z kołami stożkowymi Prosty MR z kołami stożkowymi PG MR półoś napędowa Elementy MR: - koła koronowe, - satelity, - sworzeń, - obudowa MR Mechanizm wynaleziony ok. 3 wieku n.e. (Chiny) Mechanizmy różnicowe • Najbardziej rozpowszechniony typ MR: w postaci przekładni planetarnej z kołami stożkowymi Prosty MR z kołami stożkowymi • Napęd jest doprowadzany do jarzma stożkowej przekładni planetarnej – obudowy MR (połączonej sztywno z kołem talerzowym PG). • Dalej, poprzez satelity umiejscowione na sworzniach umocowanych w obudowie MR, napęd jest przekazywany do półosi napędowych za pośrednictwem stożkowych kół zębatych współpracujących satelitami – kół koronowych. Mechanizmy różnicowe • Najbardziej rozpowszechniony typ MR: w postaci przekładni planetarnej z kołami stożkowymi Prosty MR z kołami stożkowymi • Napęd jest doprowadzany do jarzma stożkowej przekładni planetarnej – obudowy MR (połączonej sztywno z
(…)
…).
• O własnościach MR decyduje więc wartość momentu tarcia Tt.
• Na wartość Tt składają się:
-przede wszystkim siły tarcia zależne od wartości przenoszonego momentu To
-oporów od sił wewnętrznych, niezależnych od przenoszonej wartości momentu obrotowego (są relatywnie niewielkie).
• Można przyjąć, że moment tarcia jest proporcjonalny do wartości przenoszonego momentu:
Tt = kTo
k – współczynnik tarcia wewnętrznego MR
Mechanizmy różnicowe
Własności kinematyczne mechanizmu różnicowego
To, o
4
5
1 T1
1, 2
3
4
5
6
T2
6
-
półosie napędowe,
koło talerzowe PG,
obudowa MR
satelita MR
koło koronowe
2
2
1
T1, T2 – momenty przekazywane na półosi
napędowe
To – moment dostarczony do obudowy MR
(moment napędowy)
1
o 1 2
2
Tt = kTo
k – współczynnik tarcia wewnętrznego MR
3
• Stosunek wartości momentów…
… połączenie kinem. półosi);
B. zapewniające wysoką wartość momentu tarcia wewnętrznego.
Ad. 3. MR ślimakowe
-dają możliwość uzyskania bardzo dużych (stałych) wartości momentu tarcia;
-typowa budowa: 6 ślimacznic oraz 8 ślimaków (kołami koronkowymi i satelitami są ślimacznice);
- wartość momentu tarcia wewnętrznego jest funkcją kąta pochylenia
linii śrubowej ślimaka oraz współczynnika tarcia
- praktycznie…
… więc wartość momentu tarcia Tt.
• Na wartość Tt składają się:
-przede wszystkim siły tarcia zależne od wartości przenoszonego momentu To
-oporów od sił wewnętrznych, niezależnych od przenoszonej wartości momentu obrotowego (są relatywnie niewielkie).
• Można przyjąć, że moment tarcia jest proporcjonalny do wartości przenoszonego momentu:
Tt = kTo k – współczynnik tarcia wewnętrznego MR
Mechanizmy różnicowe
Własności kinematyczne mechanizmu różnicowego
1, 2 - półosie napędowe, T1, T2 – momenty przekazywane na półosi
3 - koło talerzowe PG,
To, o napędowe
4 - obudowa MR
5 - satelita MR To – moment dostarczony do obudowy MR
5 4 6 - koło koronowe (moment napędowy)
T2
1 T1 2 o 1 2
6 1
1 2 2
Tt = kTo
k – współczynnik tarcia wewnętrznego MR
3
• Stosunek wartości momentów na półosiach T1, T2…
… nie są równe (np. jako skutek różnych oporów na kołach
jezdnych) moment działający na satelity nie jest równy zero. Moment ten wywołuje ruch obrotowy
satelitów prowadzący w efekcie do zróżnicowania prędkości obrotowych kół koronowych (a więc i kół
jezdnych)
Mechanizmy różnicowe
Własności kinematyczne mechanizmu różnicowego
1, 2
3
4
5
6
To, o
5
1 T1
4
T2
6
-
półosie napędowe,
koło talerzowe PG,
obudowa MR…
…);
gdy jedno z kół utraci przyczepność.
„oś zblokowana”
„oś rozdzielona MR”
Wnioski:
• Siła wzdłużna przenoszona przez koło wewnętrzne jest zawsze większa niż przez koło zewnętrzne (biorąc pod
uwagę również to że Qw<Qz, kołem które obraca się z większym poślizgiem jest zawsze koło wewnętrzne).
• W przypadku braku MR o wartości momentu skręcającego w półosi decyduje współczynnik przyczepności
• W przypadku działania MR, maksymalny moment skręcający półoś zależy przede wszystkim od wartości
momentu To. Może on jedynie nieznacznie być większy od ½ To.
Mechanizmy różnicowe
Wpływ MR na własności trakcyjne samochodu
Różnica momentów niezbędna do wprawienia w działanie MR może powstać w następujących sytuacjach:
I.
gdy wymuszony jest ruch kół z różnymi prędkościami (np. jazda po łuku);
II.
gdy jedno z kół utraci…
… ryzyko zniszczenia w
przypadku np. jazdy na łuku
na dobrej nawierzchni jeśli
sprzęgło pozostanie włączone
Problem do uniknięcia przy
sterowaniu elektronicznym włączanie sprzęgła możliwe dopiero
przy odpowiednio dużej różnicy
prędkości obrotowych
Mechanizmy różnicowe
MR o zwiększonym tarciu wewnętrznym
A. umożliwiające czasowe wyłączenie z pracy MR (sztywne połączenie kinem. półosi);
B. zapewniające…
… jakości (odpowiednio
obrobione cieplno-chemicznie stale stopowe)
-posiadają niezbyt wysoką trwałość
Mechanizmy różnicowe
MR o zwiększonym tarciu wewnętrznym
A. umożliwiające czasowe wyłączenie z pracy MR (sztywne połączenie kinem. półosi);
B. zapewniające wysoką wartość momentu tarcia wewnętrznego.
Ad. 2. MR krzywkowe
budowa:
– na jednej półosi napędowej osadzona piasta z wewnętrzną powierzchnią…
… jakości (odpowiednio
obrobione cieplno-chemicznie stale stopowe)
-posiadają niezbyt wysoką trwałość
Mechanizmy różnicowe
MR o zwiększonym tarciu wewnętrznym
A. umożliwiające czasowe wyłączenie z pracy MR (sztywne połączenie kinem. półosi);
B. zapewniające wysoką wartość momentu tarcia wewnętrznego.
Ad. 2. MR krzywkowe
budowa:
– na jednej półosi napędowej osadzona piasta z wewnętrzną powierzchnią…
… zaklinowanie popychaczy
między krzywkami – nie ma ruchu względnego półosi;
-gdy pojawi się dostatecznie duża różnica momentów na
kołach – jedna z półosi zaczyna obracać się z większą
prędkością niż kosz, a druga z mniejszą (szybciej
obraca się półoś, na której moment jest mniejszy);
Mechanizmy różnicowe
MR o zwiększonym tarciu wewnętrznym
A. umożliwiające czasowe wyłączenie z pracy MR (sztywne połączenie…
... zobacz całą notatkę
Komentarze użytkowników (0)