To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Równania różnicowe. Transformata Z
Zalety sygnałów cyfrowych w stosunku do analogowych
1. Mała podatność na warunki atmosferyczne: temperaturę , wilgotność oraz na starzenie się materiału. 2. Brak interakcji pomiędzy sygnałami, redukcja kosztów
3. Brak dryfu parametrów 4. Wysoka pewność pomiarów 5. Złożone zadania mogą zostać wykonane przy niskich nakładach na sprzęt 6. Łatwość wprowadzania zmian w oprogramowaniu Wady
Błędy wynikające ze skończonej precyzji (rozdzielczości) Nagłe zmiany sygnałów z powodu ich dyskretnej postaci Potrzeba znajomości złożonych metod inżynierskich ograniczenia związane z czasem przetwarzania sygnału
Zwiększona podatność na błędy zasadnicze.
Transformata Z.
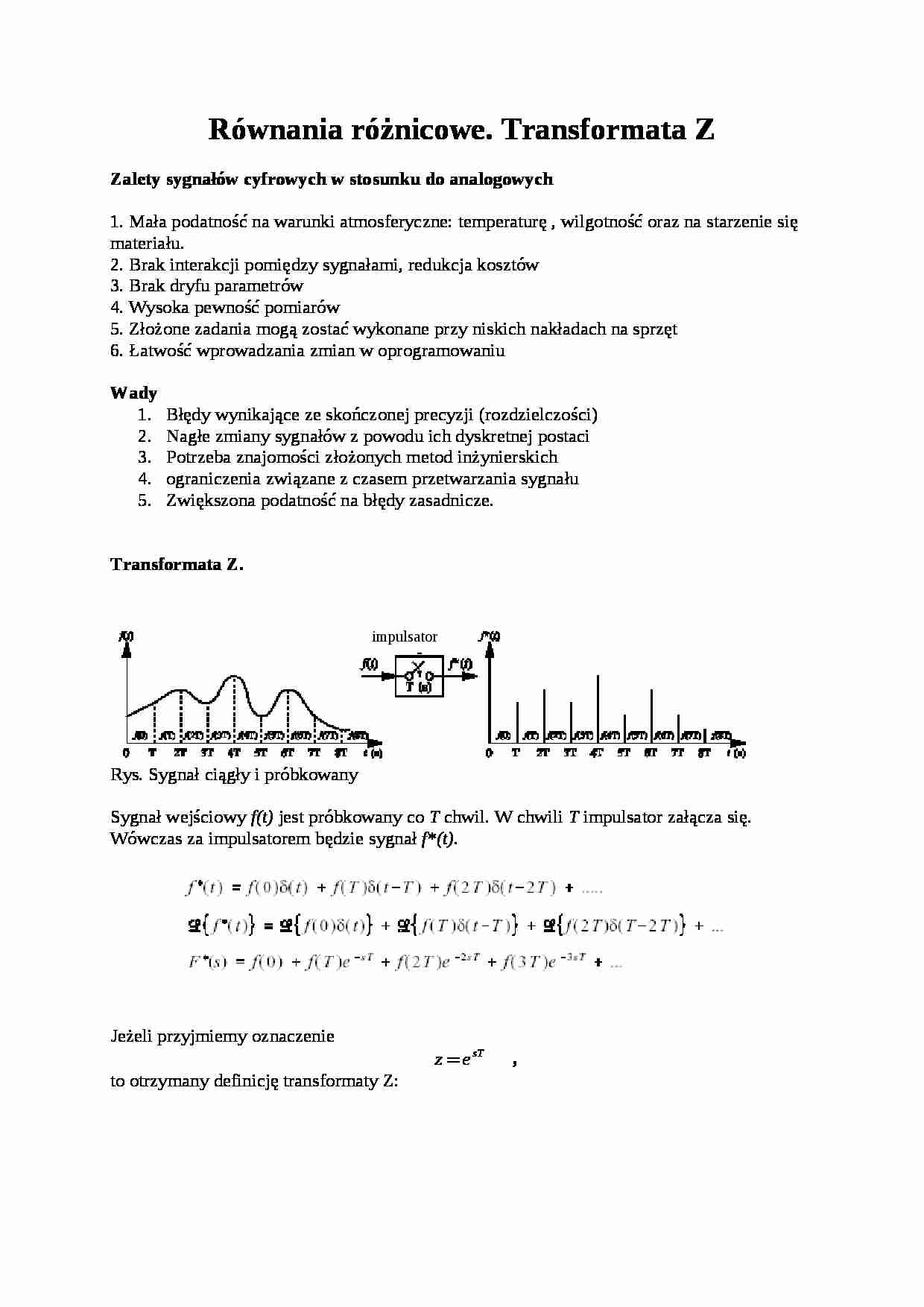
Rys. Sygnał ciągły i próbkowany
Sygnał wejściowy f(t) jest próbkowany co T chwil. W chwili T impulsator załącza się. Wówczas za impulsatorem będzie sygnał f*(t).
Jeżeli przyjmiemy oznaczenie
, to otrzymany definicję transformaty Z:
Twierdzenie o wartości końcowej:
i początkowej:
.
Transmitancja Z.
Analogicznie do transmitancji Laplace'a
można zdefiniować transmitancję Z:
.
Dla z=ejωT otrzymywana jest dyskretna transformata Fouriera. Transformata Z ma własności analogiczne do transformaty Laplace'a - jest liniowa i ma całkę splotu:
Jeżeli m=k-n , to k=m+n oraz
Ostatnie równanie stanowi iloczyn transformat Z sygnału wejściowego u(t) oraz odpowiedzi impulsowej obiektu h(t). Po wymnożeniu nawiasów otrzymywana jest odpowiedź obiektu na kolejne sygnały wejściowe
Sygnał wyjściowy z obiektu y(t) jest sumą odpowiedzi impulsowych :
G(z) jest transmitancja dyskretną obiektu.
impulsator
... zobacz całą notatkę
Komentarze użytkowników (0)