To tylko jedna z 9 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Kinematyka i dynamika punktu i ciała sztywnego
Materiał nauczania
Kinematyka jest działem mechaniki zajmującym się badaniem ruchu ciał bez
uwzględniania przyczyn, które ten ruch wywołują. Ruchem nazywamy zmianę połoŜenia
ciała względem innego ciała, które traktowane jest jako układ odniesienia. Ze względu układ
odniesienia ruch dzielimy na:
ruch bezwzględny; jest to ruch określony w ruchomym układzie odniesienia,
−
ruch względny; jest to ruch określony względem ruchomego układu odniesienia.
−
Ruch punktu moŜemy określić równaniem prędkości:
v = f (t )
i równaniem ruchu:
s = f (t )
Ze względu kształt toru ruch moŜna podzielić na:
prostoliniowy − torem jest linia prosta,
−
krzywoliniowy − torem jest dowolna linia na geometryczna na płaszczyźnie (ruch płaski)
−
lub w przestrzeni (ruch przestrzenny).
Ruch prostoliniowy jednostajny
W ruchu prostoliniowym jednostajnym stosunek drogi do czasu, w którym ta droga
została przebyta, nazywamy prędkością. Prędkość ma wartość stałą
s
v = = const [m/s]
t
Droga w ruchu jest proporcjonalna do czasu trwania ruchu.
s = v ⋅ t równanie ruchu prostoliniowego jednostajnego
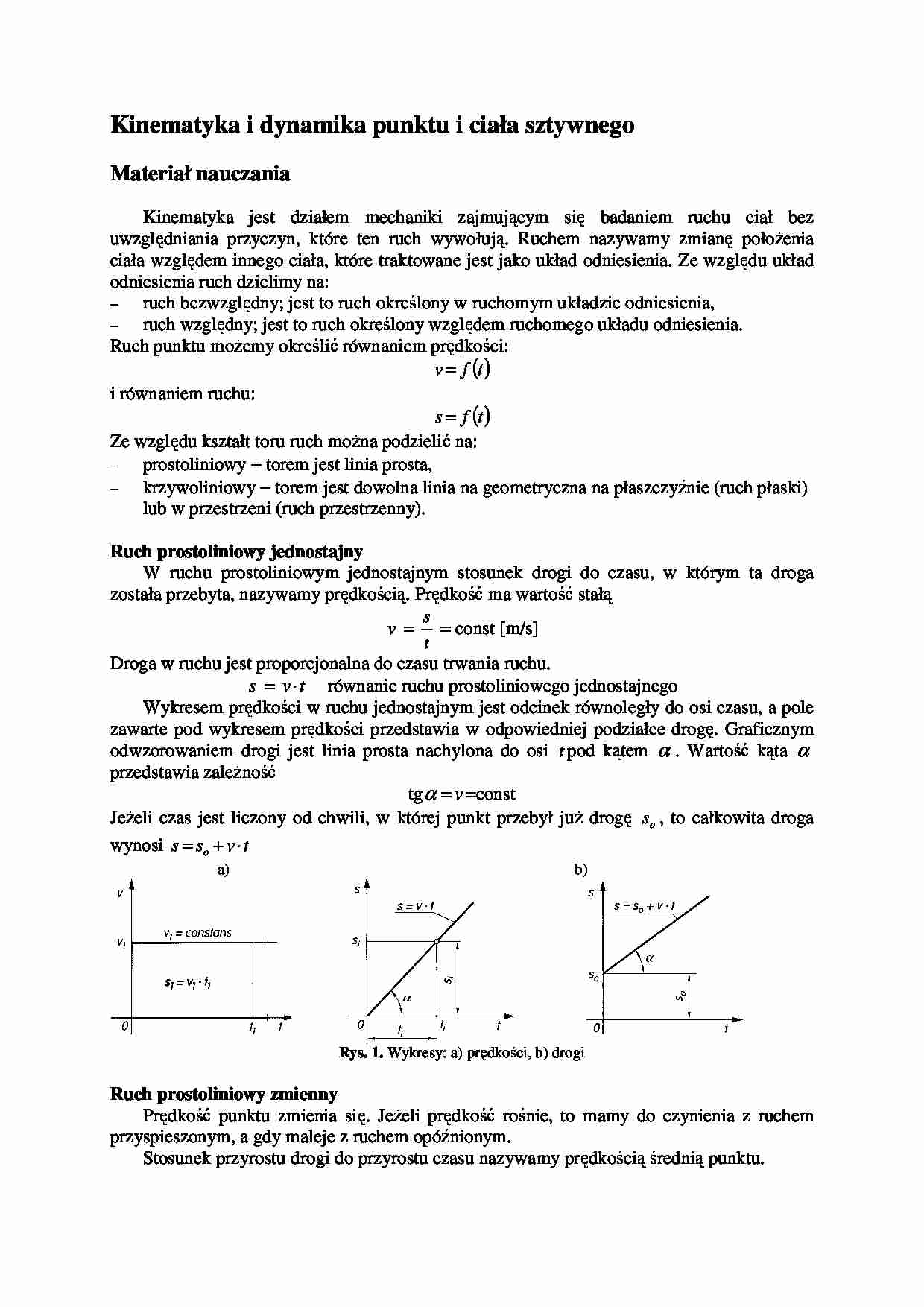
Wykresem prędkości w ruchu jednostajnym jest odcinek równoległy do osi czasu, a pole
zawarte pod wykresem prędkości przedstawia w odpowiedniej podziałce drogę. Graficznym
odwzorowaniem drogi jest linia prosta nachylona do osi t pod kątem α . Wartość kąta α
przedstawia zaleŜność
tg α = v =const
JeŜeli czas jest liczony od chwili, w której punkt przebył juŜ drogę so , to całkowita droga
wynosi s = so + v ⋅ t
a)
b)
Rys. 1. Wykresy: a) prędkości, b) drogi
Ruch prostoliniowy zmienny
Prędkość punktu zmienia się. JeŜeli prędkość rośnie, to mamy do czynienia z ruchem
przyspieszonym, a gdy maleje z ruchem opóźnionym.
Stosunek przyrostu drogi do przyrostu czasu nazywamy prędkością średnią punktu.
v=
∆s s 2 − s1
=
∆t t 2 − t1
Prędkością chwilową nazywamy granicę wyraŜenia
∆s
, jeŜeli przyrost ∆t dąŜy do zera.
∆t
∆s
, gdy ∆t → 0
∆t
Dla określenia przyspieszenia wyznaczamy przyrosty prędkości.
Przyspieszeniem średnim nazywamy stosunek przyrostu prędkości do czasu, w którym ten
przyrost nastąpił.
∆v v2 − v1
a=
=
[m/s2]
∆t t 2 − t1
Przyspieszenie chwilowe określa zaleŜność
∆v
a =lim
, gdy ∆t → 0
∆t
Równanie prędkości ruchu jednostajnie zmiennego przyspieszonego
v = vo + a ⋅ t
Równanie prędkości ruchu jednostajnie zmiennego opóźnionego
v = vo − a ⋅ t
Równanie drogi
a ⋅t2
s = vo ⋅ t ±
2
v =lim
a)
b)
Rys. 2. Wykresy: a) prędkości, b) drogi
Ruch krzywoliniowy jednostajny
Torem takiego ruchu jest linia krzywa, do której styczne są wektory prędkości o równych
wartościach.
Miejsce geometryczne wektorów prędkości wykreślonych ze wspólnego punktu nazywamy
hodografem prędkości. Hodograf w ruchu krzywoliniowym jednostajnym jest łukiem okręgu
o promieniu równym wartości prędkości poruszającego się punktu.
Rys. 3. Ruch krzywoliniowy jednostajny: a) wektory prędkości, b) hodograf prędkości
Przyspieszenie chwilowe ma kierunek prostopadły (normalny) do prędkości
(…)
… − A .
Dynamika bada związki między ruchem ciała i przyczynami, który ten ruch wywołują.
Oparta jest na trzech prawach Newtona.
Pierwsze prawo ( prawo bezwładności): Punkt materialny lub ciało sztywne, na który nie
działa Ŝadna siła, lub działają siły równowaŜące się, pozostaje w spoczynku lub w ruchu
jednostajnym prostoliniowym.
Drugie prawo: Przyspieszenie punktu materialnego lub ciała sztywnego…
…, b) punktu
Siła bezwładności jest równa iloczynowi masy poruszającego się ciała i przyspieszenia tego
ruchu.
Suma wszystkich sił zewnętrznych działających na punkt materialny znajdujący się w ruchu
równowaŜy się w kaŜdej chwili z siłą bezwładności tego punktu.
(
)
F + − m ⋅ a =0
zasada D′Alemberta
W ruchu postępowym badanie ruchu sprowadza się do badania jednego punktu, przy czym
najczęściej punkt ten jest środkiem masy ciała. Siła F działająca na środek masy ciała
w przestrzennym prostokątnym układzie osi współrzędnych x, y , z rozłoŜona moŜe być na
trzy składowe, które wywołują ruch wzdłuŜ tych osi.
Dynamiczne równania ruchu postępowego
Fx = m ⋅ a x
Fy = m ⋅ a y
Fz = m ⋅ a z
Rys. 12. Ruch postępowy i równanie dynamiczne ruchu
W uchu obrotowym ciała sztywnego dookoła nieruchomej osi wyznaczmy dynamiczne…
….
Wielkością charakteryzującą ten ruch jest przyspieszenie kątowe, które jest stosunkiem
przyrostu prędkości kątowej do przedziału czasu, gdy ten dąŜy do zera.
ε =lim
ω
∆t
, gdy ∆t → 0
[rad/s2]
Przyspieszenie normalne
an =
Przyspieszenie styczne
−
v2
r
at = r ⋅ ε ,
gdzie r − promień koła.
Ciała sztywne mogą poruszać się ruchem:
postępowym,
−
−
obrotowym,
płaskim.
W ruchu postępowym punkty ciała sztywnego…
… z prędkością dowolnego punktu ciała i obrotowego dookoła tego punktu
z prędkością kątową lub moŜe być w kaŜdej chwili ruchem obrotowym dookoła chwilowego
środka obrotu (S − środek chwilowego obrotu jest punktem przecięcia normalnych do
wektorów prędkości).
a)
b)
r
r
r
V A = VB + VB − A
Rys. 6. Ruch płaski bryły: a) suma ruchu postępowego i obrotowego, b) ruch obrotowy względem środka
chwilowego obrotu…
... zobacz całą notatkę
Komentarze użytkowników (0)