Wyprowadzenie równań obiektu dynamicznego i macierzy - wykład
- Politechnika Warszawska
- Podstawy automatyki
Pobrań: 77
Wyświetleń: 280
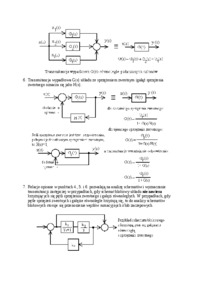
Wyprowadzenie równań obiektu dynamicznego i macierzy. Wymnażając stronami równanie p.1c otrzymujemy: a po przejściu do dziedziny czasu otrzymujemy: , Otrzymane równanie jest równaniem różniczkowym II rzędu, zatem można utworzyć dwa równan...