Zbiorniki tłokowe - omówienie
- Politechnika Warszawska
- Konstrukcje metalowe
Pobrań: 42
Wyświetleń: 756
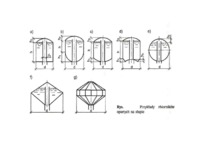
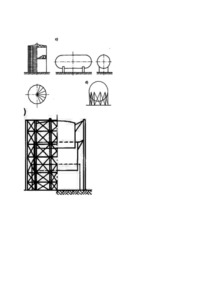
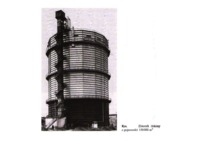
Zbiorniki tłokowe • Zbiorniki tłokowe, zwane suchymi, są lżejsze od dzwonowych i zapewniają bardziej wyrównane ciśnienie • Objętość tych zbiorników w warunkach krajowych wynosiła najczęściej 80 000 – 160 000 m3. • Zbiorniki tłokowe mają kształt graniastosłupa foremnego.Liczba boków podstawy j...