Ocena własności liniowego układu dynamicznego - wykład
- Politechnika Warszawska
- Podstawy automatyki
Pobrań: 21
Wyświetleń: 511
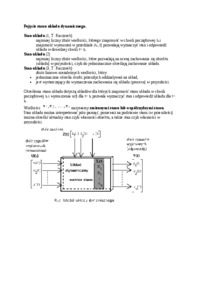
Ocena własności liniowego układu dynamicznego może zostać dokonana: na podstawie równania różniczkowego, nie zawsze jest to dogodna metoda, ponieważ zakłada rozwiązanie tego...